|
| static Point2 | Project (const Point3 &pc, OptionalJacobian< 2, 3 > Dpoint=boost::none) |
| | Project from 3D point in camera coordinates into image Does not throw a CheiralityException, even if pc behind image plane. More...
|
| |
| static Point2 | Project (const Unit3 &pc, OptionalJacobian< 2, 2 > Dpoint=boost::none) |
| | Project from 3D point at infinity in camera coordinates into image Does not throw a CheiralityException, even if pc behind image plane. More...
|
| |
|
static Point3 | BackprojectFromCamera (const Point2 &p, const double depth, OptionalJacobian< 3, 2 > Dpoint=boost::none, OptionalJacobian< 3, 1 > Ddepth=boost::none) |
| | backproject a 2-dimensional point to a 3-dimensional point at given depth
|
| |
|
std::pair< Point2, bool > | projectSafe (const Point3 &pw) const |
| | Project a point into the image and check depth.
|
| |
| Point2 | project2 (const Point3 &point, OptionalJacobian< 2, 6 > Dpose=boost::none, OptionalJacobian< 2, 3 > Dpoint=boost::none) const |
| | Project point into the image Throws a CheiralityException if point behind image plane iff GTSAM_THROW_CHEIRALITY_EXCEPTION. More...
|
| |
| Point2 | project2 (const Unit3 &point, OptionalJacobian< 2, 6 > Dpose=boost::none, OptionalJacobian< 2, 2 > Dpoint=boost::none) const |
| | Project point at infinity into the image Throws a CheiralityException if point behind image plane iff GTSAM_THROW_CHEIRALITY_EXCEPTION. More...
|
| |
|
|
| static Pose3 | LevelPose (const Pose2 &pose2, double height) |
| | Create a level pose at the given 2D pose and height. More...
|
| |
| static Pose3 | LookatPose (const Point3 &eye, const Point3 &target, const Point3 &upVector) |
| | Create a camera pose at the given eye position looking at a target point in the scene with the specified up direction vector. More...
|
| |
|
| static std::pair< size_t, size_t > | translationInterval () |
| | Return the start and end indices (inclusive) of the translation component of the exponential map parameterization. More...
|
| |
|
|
| static Matrix26 | Dpose (const Point2 &pn, double d) |
| | Calculate Jacobian with respect to pose. More...
|
| |
| static Matrix23 | Dpoint (const Point2 &pn, double d, const Matrix3 &Rt) |
| | Calculate Jacobian with respect to point. More...
|
| |
◆ Dpoint()
| Matrix23 gtsam::PinholeBase::Dpoint |
( |
const Point2 & |
pn, |
|
|
double |
d, |
|
|
const Matrix3 & |
Rt |
|
) |
| |
|
staticprotected |
Calculate Jacobian with respect to point.
- Parameters
-
| pn | projection in normalized coordinates |
| d | disparity (inverse depth) |
| Rt | transposed rotation matrix |
◆ Dpose()
| Matrix26 gtsam::PinholeBase::Dpose |
( |
const Point2 & |
pn, |
|
|
double |
d |
|
) |
| |
|
staticprotected |
Calculate Jacobian with respect to pose.
- Parameters
-
| pn | projection in normalized coordinates |
| d | disparity (inverse depth) |
◆ LevelPose()
| Pose3 gtsam::PinholeBase::LevelPose |
( |
const Pose2 & |
pose2, |
|
|
double |
height |
|
) |
| |
|
static |
Create a level pose at the given 2D pose and height.
- Parameters
-
| K | the calibration |
| pose2 | specifies the location and viewing direction (theta 0 = looking in direction of positive X axis) |
| height | camera height |
◆ LookatPose()
Create a camera pose at the given eye position looking at a target point in the scene with the specified up direction vector.
- Parameters
-
| eye | specifies the camera position |
| target | the point to look at |
| upVector | specifies the camera up direction vector, doesn't need to be on the image plane nor orthogonal to the viewing axis |
◆ Project() [1/2]
Project from 3D point in camera coordinates into image Does not throw a CheiralityException, even if pc behind image plane.
- Parameters
-
| pc | point in camera coordinates |
◆ Project() [2/2]
Project from 3D point at infinity in camera coordinates into image Does not throw a CheiralityException, even if pc behind image plane.
- Parameters
-
| pc | point in camera coordinates |
◆ project2() [1/2]
Project point into the image Throws a CheiralityException if point behind image plane iff GTSAM_THROW_CHEIRALITY_EXCEPTION.
- Parameters
-
| point | 3D point in world coordinates |
- Returns
- the intrinsic coordinates of the projected point
◆ project2() [2/2]
Project point at infinity into the image Throws a CheiralityException if point behind image plane iff GTSAM_THROW_CHEIRALITY_EXCEPTION.
- Parameters
-
| point | 3D point in world coordinates |
- Returns
- the intrinsic coordinates of the projected point
◆ translationInterval()
| static std::pair<size_t, size_t> gtsam::PinholeBase::translationInterval |
( |
| ) |
|
|
inlinestatic |
Return the start and end indices (inclusive) of the translation component of the exponential map parameterization.
- Returns
- a pair of [start, end] indices into the tangent space vector
The documentation for this class was generated from the following files:
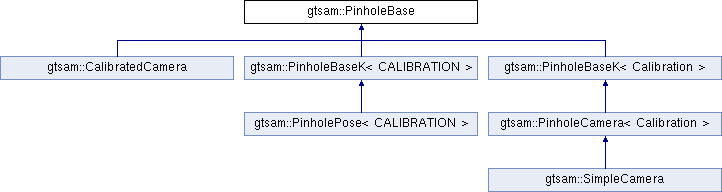
 Inheritance diagram for gtsam::PinholeBase:
Inheritance diagram for gtsam::PinholeBase: