gtsam::PreintegrationBase Class Referenceabstract
Detailed Description
PreintegrationBase is the base class for PreintegratedMeasurements (in ImuFactor) and CombinedPreintegratedMeasurements (in CombinedImuFactor).
It includes the definitions of the preintegrated variables and the methods to access, print, and compare them.
 Inheritance diagram for gtsam::PreintegrationBase:
Inheritance diagram for gtsam::PreintegrationBase: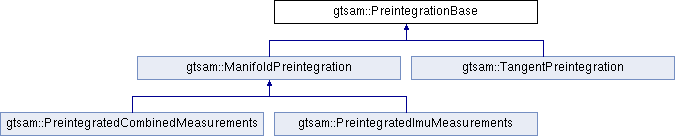
Testable | |
| virtual void | print (const std::string &s) const |
| GTSAM_EXPORT friend std::ostream & | operator<< (std::ostream &os, const PreintegrationBase &pim) |
Public Member Functions | |
Constructors | |
| PreintegrationBase (const boost::shared_ptr< Params > &p, const imuBias::ConstantBias &biasHat=imuBias::ConstantBias()) | |
| Constructor, initializes the variables in the base class. More... | |
Basic utilities | |
Re-initialize PreintegratedMeasurements and set new bias | |
| virtual void | resetIntegration ()=0 |
| void | resetIntegrationAndSetBias (const Bias &biasHat) |
| bool | matchesParamsWith (const PreintegrationBase &other) const |
| check parameters equality: checks whether shared pointer points to same Params object. | |
| const boost::shared_ptr< Params > & | params () const |
| shared pointer to params | |
| const Params & | p () const |
| const reference to params | |
Instance variables access | |
| const imuBias::ConstantBias & | biasHat () const |
| double | deltaTij () const |
| virtual Vector3 | deltaPij () const =0 |
| virtual Vector3 | deltaVij () const =0 |
| virtual Rot3 | deltaRij () const =0 |
| virtual NavState | deltaXij () const =0 |
| Vector6 | biasHatVector () const |
Main functionality | |
| std::pair< Vector3, Vector3 > | correctMeasurementsBySensorPose (const Vector3 &unbiasedAcc, const Vector3 &unbiasedOmega, OptionalJacobian< 3, 3 > correctedAcc_H_unbiasedAcc=boost::none, OptionalJacobian< 3, 3 > correctedAcc_H_unbiasedOmega=boost::none, OptionalJacobian< 3, 3 > correctedOmega_H_unbiasedOmega=boost::none) const |
| Subtract estimate and correct for sensor pose Compute the derivatives due to non-identity body_P_sensor (rotation and centrifugal acc) Ignore D_correctedOmega_measuredAcc as it is trivially zero. | |
| virtual void | update (const Vector3 &measuredAcc, const Vector3 &measuredOmega, const double dt, Matrix9 *A, Matrix93 *B, Matrix93 *C)=0 |
| Update preintegrated measurements and get derivatives It takes measured quantities in the j frame Modifies preintegrated quantities in place after correcting for bias and possibly sensor pose. | |
| virtual void | integrateMeasurement (const Vector3 &measuredAcc, const Vector3 &measuredOmega, const double dt) |
| Version without derivatives. | |
| virtual Vector9 | biasCorrectedDelta (const imuBias::ConstantBias &bias_i, OptionalJacobian< 9, 6 > H=boost::none) const =0 |
| Given the estimate of the bias, return a NavState tangent vector summarizing the preintegrated IMU measurements so far. | |
| NavState | predict (const NavState &state_i, const imuBias::ConstantBias &bias_i, OptionalJacobian< 9, 9 > H1=boost::none, OptionalJacobian< 9, 6 > H2=boost::none) const |
| Predict state at time j. | |
| Vector9 | computeError (const NavState &state_i, const NavState &state_j, const imuBias::ConstantBias &bias_i, OptionalJacobian< 9, 9 > H1, OptionalJacobian< 9, 9 > H2, OptionalJacobian< 9, 6 > H3) const |
| Calculate error given navStates. | |
| Vector9 | computeErrorAndJacobians (const Pose3 &pose_i, const Vector3 &vel_i, const Pose3 &pose_j, const Vector3 &vel_j, const imuBias::ConstantBias &bias_i, OptionalJacobian< 9, 6 > H1=boost::none, OptionalJacobian< 9, 3 > H2=boost::none, OptionalJacobian< 9, 6 > H3=boost::none, OptionalJacobian< 9, 3 > H4=boost::none, OptionalJacobian< 9, 6 > H5=boost::none) const |
| Compute errors w.r.t. More... | |
Public Types | |
| typedef imuBias::ConstantBias | Bias |
| typedef PreintegrationParams | Params |
Protected Member Functions | |
| PreintegrationBase () | |
| Default constructor for serialization. | |
| virtual | ~PreintegrationBase () |
| Virtual destructor for serialization. | |
Protected Attributes | |
| boost::shared_ptr< Params > | p_ |
| Parameters. More... | |
| Bias | biasHat_ |
| Acceleration and gyro bias used for preintegration. | |
| double | deltaTij_ |
| Time interval from i to j. | |
Constructor & Destructor Documentation
◆ PreintegrationBase()
| gtsam::PreintegrationBase::PreintegrationBase | ( | const boost::shared_ptr< Params > & | p, |
| const imuBias::ConstantBias & | biasHat = imuBias::ConstantBias() |
||
| ) |
Constructor, initializes the variables in the base class.
- Parameters
-
p Parameters, typically fixed in a single application bias Current estimate of acceleration and rotation rate biases
Member Function Documentation
◆ computeErrorAndJacobians()
| Vector9 gtsam::PreintegrationBase::computeErrorAndJacobians | ( | const Pose3 & | pose_i, |
| const Vector3 & | vel_i, | ||
| const Pose3 & | pose_j, | ||
| const Vector3 & | vel_j, | ||
| const imuBias::ConstantBias & | bias_i, | ||
| OptionalJacobian< 9, 6 > | H1 = boost::none, |
||
| OptionalJacobian< 9, 3 > | H2 = boost::none, |
||
| OptionalJacobian< 9, 6 > | H3 = boost::none, |
||
| OptionalJacobian< 9, 3 > | H4 = boost::none, |
||
| OptionalJacobian< 9, 6 > | H5 = boost::none |
||
| ) | const |
Compute errors w.r.t.
preintegrated measurements and jacobians wrt pose_i, vel_i, bias_i, pose_j, bias_j
Member Data Documentation
◆ p_
|
protected |
Parameters.
Declared mutable only for deprecated predict method. TODO(frank): make const once deprecated method is removed
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam/navigation/PreintegrationBase.h
- /Users/dellaert/git/gtsam/gtsam/navigation/PreintegrationBase.cpp
