gtsam::DiscreteConditional Class Reference
Detailed Description
Discrete Conditional Density Derives from DecisionTreeFactor.
 Inheritance diagram for gtsam::DiscreteConditional:
Inheritance diagram for gtsam::DiscreteConditional: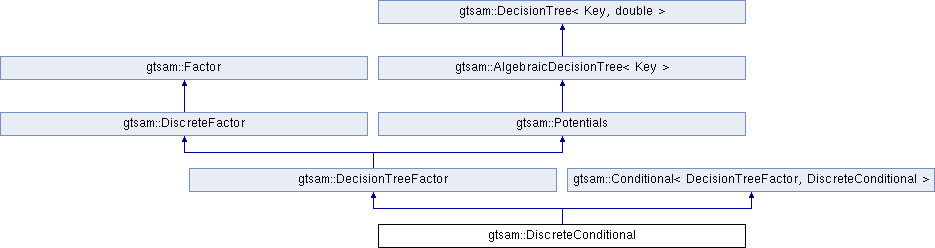
Standard Constructors | |
| DiscreteConditional () | |
| default constructor needed for serialization | |
| DiscreteConditional (size_t nFrontals, const DecisionTreeFactor &f) | |
| constructor from factor | |
| DiscreteConditional (const Signature &signature) | |
| Construct from signature. | |
| DiscreteConditional (const DecisionTreeFactor &joint, const DecisionTreeFactor &marginal, const boost::optional< Ordering > &orderedKeys=boost::none) | |
| construct P(X|Y)=P(X,Y)/P(Y) from P(X,Y) and P(Y) | |
| template<typename ITERATOR > | |
| static shared_ptr | Combine (ITERATOR firstConditional, ITERATOR lastConditional) |
| Combine several conditional into a single one. More... | |
Public Member Functions | |
Testable | |
| void | print (const std::string &s="Discrete Conditional: ", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| GTSAM-style print. | |
| bool | equals (const DiscreteFactor &other, double tol=1e-9) const |
| GTSAM-style equals. | |
Standard Interface | |
| virtual double | operator() (const Values &values) const |
| Evaluate, just look up in AlgebraicDecisonTree. | |
| DecisionTreeFactor::shared_ptr | toFactor () const |
| Convert to a factor. | |
| ADT | choose (const Assignment< Key > &parentsValues) const |
| Restrict to given parent values, returns AlgebraicDecisionDiagram. | |
| size_t | solve (const Values &parentsValues) const |
| solve a conditional More... | |
| size_t | sample (const Values &parentsValues) const |
| sample More... | |
Advanced Interface | |
| void | solveInPlace (Values &parentsValues) const |
| solve a conditional, in place | |
| void | sampleInPlace (Values &parentsValues) const |
| sample in place, stores result in partial solution | |
| Public Member Functions inherited from gtsam::DecisionTreeFactor | |
| DecisionTreeFactor () | |
| Default constructor for I/O. | |
| DecisionTreeFactor (const DiscreteKeys &keys, const ADT &potentials) | |
| Constructor from Indices, Ordering, and AlgebraicDecisionDiagram. | |
| template<class SOURCE > | |
| DecisionTreeFactor (const DiscreteKeys &keys, SOURCE table) | |
| Constructor from Indices and (string or doubles) | |
| DecisionTreeFactor (const DiscreteConditional &c) | |
| Construct from a DiscreteConditional type. | |
| DecisionTreeFactor | operator * (const DecisionTreeFactor &f) const |
| multiply two factors | |
| DecisionTreeFactor | operator/ (const DecisionTreeFactor &f) const |
| divide by factor f (safely) | |
| virtual DecisionTreeFactor | toDecisionTreeFactor () const |
| Convert into a decisiontree. | |
| shared_ptr | sum (size_t nrFrontals) const |
| Create new factor by summing all values with the same separator values. | |
| shared_ptr | sum (const Ordering &keys) const |
| Create new factor by summing all values with the same separator values. | |
| shared_ptr | max (size_t nrFrontals) const |
| Create new factor by maximizing over all values with the same separator values. | |
| DecisionTreeFactor | apply (const DecisionTreeFactor &f, ADT::Binary op) const |
| Apply binary operator (*this) "op" f. More... | |
| shared_ptr | combine (size_t nrFrontals, ADT::Binary op) const |
| Combine frontal variables using binary operator "op". More... | |
| shared_ptr | combine (const Ordering &keys, ADT::Binary op) const |
| Combine frontal variables in an Ordering using binary operator "op". More... | |
| Public Member Functions inherited from gtsam::DiscreteFactor | |
| DiscreteFactor () | |
| Default constructor creates empty factor. | |
| template<typename CONTAINER > | |
| DiscreteFactor (const CONTAINER &keys) | |
| Construct from container of keys. More... | |
| virtual | ~DiscreteFactor () |
| Virtual destructor. | |
| virtual bool | empty () const |
| Test whether the factor is empty. | |
| Public Member Functions inherited from gtsam::Factor | |
| KeyVector & | keys () |
| iterator | begin () |
| Iterator at beginning of involved variable keys. | |
| iterator | end () |
| Iterator at end of involved variable keys. | |
| void | print (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print | |
| void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys | |
| Key | front () const |
| First key. | |
| Key | back () const |
| Last key. | |
| const_iterator | find (Key key) const |
| find | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. | |
| const_iterator | begin () const |
| Iterator at beginning of involved variable keys. | |
| const_iterator | end () const |
| Iterator at end of involved variable keys. | |
| size_t | size () const |
| Public Member Functions inherited from gtsam::Potentials | |
| GTSAM_EXPORT | Potentials () |
| Default constructor for I/O. | |
| GTSAM_EXPORT | Potentials (const DiscreteKeys &keys, const ADT &decisionTree) |
| Constructor from Indices and ADT. | |
| template<class SOURCE > | |
| Potentials (const DiscreteKeys &keys, SOURCE table) | |
| Constructor from Indices and (string or doubles) | |
| GTSAM_EXPORT bool | equals (const Potentials &other, double tol=1e-9) const |
| GTSAM_EXPORT void | print (const std::string &s="Potentials: ", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| size_t | cardinality (Key j) const |
| Public Member Functions inherited from gtsam::AlgebraicDecisionTree< Key > | |
| AlgebraicDecisionTree (const Super &add) | |
| AlgebraicDecisionTree (const Key &label, double y1, double y2) | |
| Create a new leaf function splitting on a variable. | |
| AlgebraicDecisionTree (const typename Super::LabelC &labelC, double y1, double y2) | |
| Create a new leaf function splitting on a variable. | |
| AlgebraicDecisionTree (const std::vector< typename Super::LabelC > &labelCs, const std::vector< double > &ys) | |
| Create from keys and vector table. | |
| AlgebraicDecisionTree (const std::vector< typename Super::LabelC > &labelCs, const std::string &table) | |
| Create from keys and string table. | |
| AlgebraicDecisionTree (Iterator begin, Iterator end, const Key &label) | |
| Create a new function splitting on a variable. | |
| AlgebraicDecisionTree (const AlgebraicDecisionTree< M > &other, const std::map< M, Key > &map) | |
| Convert. | |
| AlgebraicDecisionTree | operator+ (const AlgebraicDecisionTree &g) const |
| sum | |
| AlgebraicDecisionTree | operator * (const AlgebraicDecisionTree &g) const |
| product | |
| AlgebraicDecisionTree | operator/ (const AlgebraicDecisionTree &g) const |
| division | |
| AlgebraicDecisionTree | sum (const Key &label, size_t cardinality) const |
| sum out variable | |
| AlgebraicDecisionTree | sum (const typename Super::LabelC &labelC) const |
| sum out variable | |
| Public Member Functions inherited from gtsam::DecisionTree< Key, double > | |
| DecisionTree (const double &y) | |
| Create a constant. | |
| DecisionTree (const Key &label, const double &y1, const double &y2) | |
| Create a new leaf function splitting on a variable. | |
| DecisionTree (const LabelC &label, const double &y1, const double &y2) | |
| Allow Label+Cardinality for convenience. | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::vector< double > &ys) | |
| Create from keys and a corresponding vector of values. | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::string &table) | |
| Create from keys and string table. | |
| DecisionTree (Iterator begin, Iterator end, const Key &label) | |
| Create DecisionTree from others. | |
| DecisionTree (const Key &label, const DecisionTree &f0, const DecisionTree &f1) | |
| Create DecisionTree from two others. | |
| DecisionTree (const DecisionTree< M, X > &other, const std::map< M, Key > &map, boost::function< double(const X &)> op) | |
| Convert from a different type. | |
| DecisionTree (const NodePtr &root) | |
| NodePtr | compose (Iterator begin, Iterator end, const Key &label) const |
| void | print (const std::string &s="DecisionTree") const |
| GTSAM-style print. | |
| bool | equals (const DecisionTree &other, double tol=1e-9) const |
| virtual | ~DecisionTree () |
| Make virtual. | |
| bool | operator== (const DecisionTree &q) const |
| equality | |
| const double & | operator() (const Assignment< Key > &x) const |
| evaluate | |
| DecisionTree | apply (const Unary &op) const |
| apply Unary operation "op" to f | |
| DecisionTree | apply (const DecisionTree &g, const Binary &op) const |
| apply binary operation "op" to f and g | |
| DecisionTree | choose (const Key &label, size_t index) const |
| create a new function where value(label)==index It's like "restrict" in Darwiche09book pg329, 330? | |
| DecisionTree | combine (const Key &label, size_t cardinality, const Binary &op) const |
| combine subtrees on key with binary operation "op" | |
| DecisionTree | combine (const LabelC &labelC, const Binary &op) const |
| combine with LabelC for convenience | |
| void | dot (std::ostream &os, bool showZero=true) const |
| output to graphviz format, stream version | |
| void | dot (const std::string &name, bool showZero=true) const |
| output to graphviz format, open a file | |
| Public Member Functions inherited from gtsam::Conditional< DecisionTreeFactor, DiscreteConditional > | |
| size_t | nrFrontals () const |
| return the number of frontals | |
| size_t | nrParents () const |
| return the number of parents | |
| Key | firstFrontalKey () const |
| Convenience function to get the first frontal key. | |
| Frontals | frontals () const |
| return a view of the frontal keys | |
| Parents | parents () const |
| return a view of the parent keys | |
| DecisionTreeFactor ::const_iterator | beginFrontals () const |
| Iterator pointing to first frontal key. More... | |
| DecisionTreeFactor ::const_iterator | endFrontals () const |
| Iterator pointing past the last frontal key. More... | |
| DecisionTreeFactor ::const_iterator | beginParents () const |
| Iterator pointing to the first parent key. More... | |
| DecisionTreeFactor ::const_iterator | endParents () const |
| Iterator pointing past the last parent key. More... | |
| size_t & | nrFrontals () |
| Mutable version of nrFrontals. | |
| DecisionTreeFactor ::iterator | beginFrontals () |
| Mutable iterator pointing to first frontal key. More... | |
| DecisionTreeFactor ::iterator | endFrontals () |
| Mutable iterator pointing past the last frontal key. More... | |
| DecisionTreeFactor ::iterator | beginParents () |
| Mutable iterator pointing to the first parent key. More... | |
| DecisionTreeFactor ::iterator | endParents () |
| Mutable iterator pointing past the last parent key. More... | |
Public Types | |
| typedef DiscreteConditional | This |
| Typedef to this class. | |
| typedef boost::shared_ptr< This > | shared_ptr |
| shared_ptr to this class | |
| typedef DecisionTreeFactor | BaseFactor |
| Typedef to our factor base class. | |
| typedef Conditional< BaseFactor, This > | BaseConditional |
| Typedef to our conditional base class. | |
| typedef Assignment< Key > | Values |
| A map from keys to values. More... | |
| typedef boost::shared_ptr< Values > | sharedValues |
| Public Types inherited from gtsam::DecisionTreeFactor | |
| typedef DecisionTreeFactor | This |
| typedef DiscreteFactor | Base |
| Typedef to base class. | |
| typedef boost::shared_ptr< DecisionTreeFactor > | shared_ptr |
| Public Types inherited from gtsam::DiscreteFactor | |
| typedef DiscreteFactor | This |
| This class. | |
| typedef boost::shared_ptr< DiscreteFactor > | shared_ptr |
| shared_ptr to this class | |
| typedef Factor | Base |
| Our base class. | |
| typedef Assignment< Key > | Values |
| A map from keys to values TODO: Do we need this? Should we just use gtsam::Values? We just need another special DiscreteValue to represent labels, However, all other Lie's operators are undefined in this class. More... | |
| typedef boost::shared_ptr< Values > | sharedValues |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. | |
| Public Types inherited from gtsam::Potentials | |
| typedef AlgebraicDecisionTree< Key > | ADT |
| Public Types inherited from gtsam::AlgebraicDecisionTree< Key > | |
| typedef DecisionTree< Key, double > | Super |
| Public Types inherited from gtsam::DecisionTree< Key, double > | |
| typedef boost::function< double(const double &)> | Unary |
| Handy typedefs for unary and binary function types. | |
| typedef boost::function< double(const double &, const double &)> | Binary |
| typedef std::pair< Key, size_t > | LabelC |
| A label annotated with cardinality. | |
| typedef Node::Ptr | NodePtr |
| ---------------------— Node base class ------------------------— More... | |
| Public Types inherited from gtsam::Conditional< DecisionTreeFactor, DiscreteConditional > | |
| typedef boost::iterator_range< typename DecisionTreeFactor ::const_iterator > | Frontals |
| View of the frontal keys (call frontals()) | |
| typedef boost::iterator_range< typename DecisionTreeFactor ::const_iterator > | Parents |
| View of the separator keys (call parents()) | |
Additional Inherited Members | |
| Public Attributes inherited from gtsam::DecisionTree< Key, double > | |
| NodePtr | root_ |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| Default constructor for I/O. | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| Construct factor from container of keys. More... | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Construct factor from iterator keys. More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
| Protected Member Functions inherited from gtsam::Potentials | |
| Potentials (const ADT &potentials) | |
| Constructor from ColumnIndex, and ADT. | |
| Protected Member Functions inherited from gtsam::DecisionTree< Key, double > | |
| NodePtr | create (It begin, It end, ValueIt beginY, ValueIt endY) const |
| Internal recursive function to create from keys, cardinalities, and Y values. | |
| NodePtr | convert (const typename DecisionTree< M, X >::NodePtr &f, const std::map< M, Key > &map, boost::function< double(const X &)> op) |
| Convert to a different type. | |
| DecisionTree () | |
| Default constructor. | |
| Protected Member Functions inherited from gtsam::Conditional< DecisionTreeFactor, DiscreteConditional > | |
| Conditional () | |
| Empty Constructor to make serialization possible. | |
| Conditional (size_t nrFrontals) | |
| Constructor. | |
| void | print (const std::string &s="Conditional", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print with optional formatter | |
| bool | equals (const This &c, double tol=1e-9) const |
| check equality | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| Construct factor from container of keys. More... | |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Construct factor from iterator keys. More... | |
| Static Protected Member Functions inherited from gtsam::Potentials | |
| static GTSAM_EXPORT double | safe_div (const double &a, const double &b) |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. | |
| Protected Attributes inherited from gtsam::Potentials | |
| std::map< Key, size_t > | cardinalities_ |
| Cardinality for each key, used in combine. | |
| Protected Attributes inherited from gtsam::Conditional< DecisionTreeFactor, DiscreteConditional > | |
| size_t | nrFrontals_ |
| The first nrFrontal variables are frontal and the rest are parents. More... | |
Member Typedef Documentation
◆ Values
A map from keys to values.
TODO: Again, do we need this???
Member Function Documentation
◆ Combine()
template<typename ITERATOR >
|
static |
Combine several conditional into a single one.
The conditionals must be given in increasing order, meaning that the parents of any conditional may not include a conditional coming before it.
- Parameters
-
firstConditional Iterator to the first conditional to combine, must dereference to a shared_ptr<DiscreteConditional>. lastConditional Iterator to after the last conditional to combine, must dereference to a shared_ptr<DiscreteConditional>.
◆ sample()
| size_t gtsam::DiscreteConditional::sample | ( | const Values & | parentsValues | ) | const |
sample
- Parameters
-
parentsValues Known values of the parents
- Returns
- sample from conditional
◆ solve()
| size_t gtsam::DiscreteConditional::solve | ( | const Values & | parentsValues | ) | const |
solve a conditional
- Parameters
-
parentsValues Known values of the parents
- Returns
- MPE value of the child (1 frontal variable).
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam/discrete/DiscreteConditional.h
- /Users/dellaert/git/gtsam/gtsam/discrete/DiscreteConditional.cpp
