gtsam::DRollPrior Class Reference
Detailed Description
Forces the roll to a particular value - useful for flying robots Implied value is zero Dim: 1.
 Inheritance diagram for gtsam::DRollPrior:
Inheritance diagram for gtsam::DRollPrior: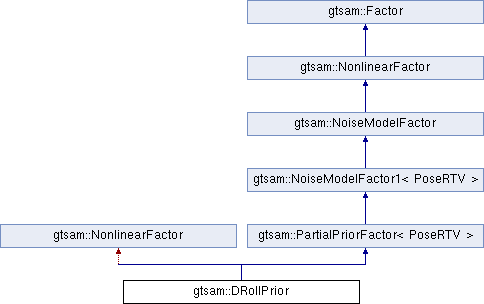
Public Member Functions | |
| DRollPrior (Key key, double wx, const gtsam::SharedNoiseModel &model) | |
| allows for explicit roll parameterization - uses canonical coordinate | |
| DRollPrior (Key key, const gtsam::SharedNoiseModel &model) | |
| Forces roll to zero. | |
| Public Member Functions inherited from gtsam::PartialPriorFactor< PoseRTV > | |
| PartialPriorFactor (Key key, size_t idx, double prior, const SharedNoiseModel &model) | |
| Single Element Constructor: acts on a single parameter specified by idx. | |
| PartialPriorFactor (Key key, const std::vector< size_t > &mask, const Vector &prior, const SharedNoiseModel &model) | |
| Indices Constructor: specify the mask with a set of indices. | |
| virtual gtsam::NonlinearFactor::shared_ptr | clone () const |
| virtual void | print (const std::string &s, const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| implement functions needed for Testable More... | |
| virtual bool | equals (const NonlinearFactor &expected, double tol=1e-9) const |
| equals | |
| Vector | evaluateError (const T &p, boost::optional< Matrix & > H=boost::none) const |
| implement functions needed to derive from Factor More... | |
| const Vector & | prior () const |
| const std::vector< bool > & | mask () const |
| const Matrix & | H () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor1< PoseRTV > | |
| NoiseModelFactor1 () | |
| Default constructor for I/O only. | |
| NoiseModelFactor1 (const SharedNoiseModel &noiseModel, Key key1) | |
| Constructor. More... | |
| Key | key () const |
| virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const |
| Calls the 1-key specific version of evaluateError, which is pure virtual so must be implemented in the derived class. | |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor () | |
| Default constructor for I/O only. | |
| virtual | ~NoiseModelFactor () |
| Destructor. | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Constructor. | |
| virtual size_t | dim () const |
| get the dimension of the factor (number of rows on linearization) | |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model | |
| Vector | whitenedError (const Values &c) const |
| Vector of errors, whitened This is the raw error, i.e., i.e. More... | |
| virtual double | error (const Values &c) const |
| Calculate the error of the factor. More... | |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const |
| Linearize a non-linearFactorN to get a GaussianFactor, \( Ax-b \approx h(x+\delta x)-z = h(x) + A \delta x - z \) Hence \( b = z - h(x) = - \mathtt{error\_vector}(x) \). | |
Public Types | |
| typedef gtsam::PartialPriorFactor< PoseRTV > | Base |
| Public Types inherited from gtsam::PartialPriorFactor< PoseRTV > | |
| typedef PoseRTV | T |
| Public Types inherited from gtsam::NoiseModelFactor1< PoseRTV > | |
| typedef PoseRTV | X |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Noise model. | |
Additional Inherited Members | |
| Protected Types inherited from gtsam::PartialPriorFactor< PoseRTV > | |
| typedef NoiseModelFactor1< PoseRTV > | Base |
| typedef PartialPriorFactor< PoseRTV > | This |
| Protected Types inherited from gtsam::NoiseModelFactor1< PoseRTV > | |
| typedef NoiseModelFactor | Base |
| typedef NoiseModelFactor1< PoseRTV > | This |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Member Functions inherited from gtsam::PartialPriorFactor< PoseRTV > | |
| PartialPriorFactor () | |
| default constructor - only use for serialization | |
| PartialPriorFactor (Key key, const SharedNoiseModel &model) | |
| constructor with just minimum requirements for a factor - allows more computation in the constructor. More... | |
| void | fillH () |
| Constructs the jacobian matrix in place. | |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Constructor - only for subclasses, as this does not set keys. | |
| Protected Attributes inherited from gtsam::PartialPriorFactor< PoseRTV > | |
| Vector | prior_ |
| measurement on tangent space parameters, in compressed form | |
| std::vector< size_t > | mask_ |
| indices of values to constrain in compressed prior vector | |
| Matrix | H_ |
| Constant Jacobian - computed at creation. | |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam_unstable/dynamics/DynamicsPriors.h
- /Users/dellaert/git/gtsam/gtsam_unstable/gtsam_unstable.h
