gtsam::PriorFactor< VALUE > Class Template Reference
 Inheritance diagram for gtsam::PriorFactor< VALUE >:
Inheritance diagram for gtsam::PriorFactor< VALUE >: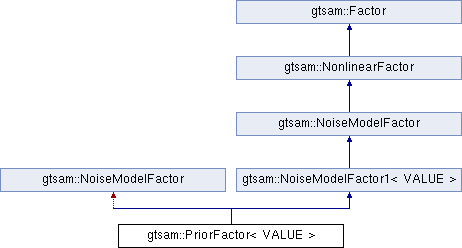
Public Member Functions | |
| PriorFactor () | |
| default constructor - only use for serialization | |
| PriorFactor (Key key, const VALUE &prior, const SharedNoiseModel &model=nullptr) | |
| Constructor. | |
| PriorFactor (Key key, const VALUE &prior, const Matrix &covariance) | |
| Convenience constructor that takes a full covariance argument. | |
| virtual gtsam::NonlinearFactor::shared_ptr | clone () const |
| virtual void | print (const std::string &s, const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| implement functions needed for Testable More... | |
| virtual bool | equals (const NonlinearFactor &expected, double tol=1e-9) const |
| equals | |
| Vector | evaluateError (const T &x, boost::optional< Matrix & > H=boost::none) const |
| implement functions needed to derive from Factor More... | |
| const VALUE & | prior () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor1< VALUE > | |
| NoiseModelFactor1 () | |
| Default constructor for I/O only. | |
| Key | key () const |
| NoiseModelFactor1 (const SharedNoiseModel &noiseModel, Key key1) | |
| Constructor. More... | |
| virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const |
| Calls the 1-key specific version of evaluateError, which is pure virtual so must be implemented in the derived class. | |
Public Types | |
| typedef VALUE | T |
| typedef boost::shared_ptr< PriorFactor< VALUE > > | shared_ptr |
| The measurement. More... | |
| typedef PriorFactor< VALUE > | This |
| Typedef to this class. | |
| Public Types inherited from gtsam::NoiseModelFactor1< VALUE > | |
| typedef VALUE | X |
Friends | |
| class | boost::serialization::access |
| Serialization function. | |
Additional Inherited Members | |
| Protected Types inherited from gtsam::NoiseModelFactor1< VALUE > | |
| typedef NoiseModelFactor | Base |
| typedef NoiseModelFactor1< VALUE > | This |
Member Typedef Documentation
◆ shared_ptr
template<class VALUE >
| typedef boost::shared_ptr<PriorFactor<VALUE> > gtsam::PriorFactor< VALUE >::shared_ptr |
The measurement.
concept check by type shorthand for a smart pointer to a factor
Member Function Documentation
◆ clone()
template<class VALUE >
|
inlinevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
◆ evaluateError()
template<class VALUE >
|
inlinevirtual |
implement functions needed to derive from Factor
vector of errors
Implements gtsam::NoiseModelFactor1< VALUE >.
◆ print()
template<class VALUE >
|
inlinevirtual |
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam/slam/PriorFactor.h
- /Users/dellaert/git/gtsam/gtsam_unstable/gtsam_unstable.h
