gtsam::RangeFactor< A1, A2, T > Class Template Reference
 Inheritance diagram for gtsam::RangeFactor< A1, A2, T >:
Inheritance diagram for gtsam::RangeFactor< A1, A2, T >: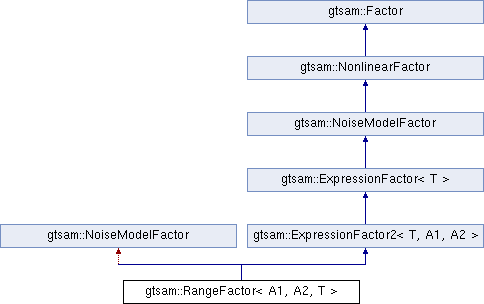
Public Member Functions | |
| RangeFactor () | |
| default constructor | |
| RangeFactor (Key key1, Key key2, T measured, const SharedNoiseModel &model) | |
| virtual gtsam::NonlinearFactor::shared_ptr | clone () const |
| virtual Expression< T > | expression (Key key1, Key key2) const |
| Recreate expression from given keys_ and measured_, used in load Needed to deserialize a derived factor. | |
| void | print (const std::string &s="", const KeyFormatter &kf=DefaultKeyFormatter) const |
| print | |
| Public Member Functions inherited from gtsam::ExpressionFactor2< T, A1, A2 > | |
| virtual | ~ExpressionFactor2 () |
| Destructor. | |
| Vector | evaluateError (const A1 &a1, const A2 &a2, boost::optional< Matrix & > H1=boost::none, boost::optional< Matrix & > H2=boost::none) const |
| Backwards compatible evaluateError, to make existing tests compile. | |
| Public Member Functions inherited from gtsam::ExpressionFactor< T > | |
| ExpressionFactor (const SharedNoiseModel &noiseModel, const T &measurement, const Expression< T > &expression) | |
| Constructor: creates a factor from a measurement and measurement function. More... | |
| virtual | ~ExpressionFactor () |
| Destructor. | |
| const T & | measured () const |
| return the measurement | |
| bool | equals (const NonlinearFactor &f, double tol) const |
| equals relies on Testable traits being defined for T | |
| virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const |
| Error function without the NoiseModel, \( z-h(x) -> Local(h(x),z) \). More... | |
| virtual boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const |
| linearize to a GaussianFactor | |
Friends | |
| class | boost::serialization::access |
Additional Inherited Members | |
| Public Types inherited from gtsam::ExpressionFactor< T > | |
| typedef boost::shared_ptr< ExpressionFactor< T > > | shared_ptr |
| Protected Types inherited from gtsam::ExpressionFactor< T > | |
| typedef ExpressionFactor< T > | This |
| Protected Member Functions inherited from gtsam::ExpressionFactor2< T, A1, A2 > | |
| ExpressionFactor2 () | |
| Default constructor, for serialization. | |
| ExpressionFactor2 (Key key1, Key key2, const SharedNoiseModel &noiseModel, const T &measurement) | |
| Constructor takes care of keys, but still need to call initialize. | |
| Protected Member Functions inherited from gtsam::ExpressionFactor< T > | |
| ExpressionFactor (const SharedNoiseModel &noiseModel, const T &measurement) | |
| Default constructor, for serialization. More... | |
| void | initialize (const Expression< T > &expression) |
| Initialize with constructor arguments. | |
| Protected Attributes inherited from gtsam::ExpressionFactor< T > | |
| T | measured_ |
| the measurement to be compared with the expression | |
| Expression< T > | expression_ |
| the expression that is AD enabled | |
| FastVector< int > | dims_ |
| dimensions of the Jacobian matrices | |
| Static Protected Attributes inherited from gtsam::ExpressionFactor< T > | |
| static const int | Dim = traits<T>::dimension |
Member Function Documentation
◆ clone()
template<typename A1 , typename A2 = A1, typename T = double>
|
inlinevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::ExpressionFactor< T >.
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam/sam/RangeFactor.h
- /Users/dellaert/git/gtsam/gtsam_unstable/gtsam_unstable.h
