|
| | RegularHessianFactor (const KeyVector &js, const std::vector< Matrix > &Gs, const std::vector< Vector > &gs, double f) |
| | Construct an n-way factor. More...
|
| |
| | RegularHessianFactor (Key j1, Key j2, const MatrixD &G11, const MatrixD &G12, const VectorD &g1, const MatrixD &G22, const VectorD &g2, double f) |
| | Construct a binary factor. More...
|
| |
| | RegularHessianFactor (Key j1, Key j2, Key j3, const MatrixD &G11, const MatrixD &G12, const MatrixD &G13, const VectorD &g1, const MatrixD &G22, const MatrixD &G23, const VectorD &g2, const MatrixD &G33, const VectorD &g3, double f) |
| | Construct a ternary factor. More...
|
| |
|
template<typename KEYS > |
| | RegularHessianFactor (const KEYS &keys, const SymmetricBlockMatrix &augmentedInformation) |
| | Constructor with an arbitrary number of keys and with the augmented information matrix specified as a block matrix.
|
| |
|
| RegularHessianFactor (const RegularJacobianFactor< D > &jf) |
| | Construct from RegularJacobianFactor.
|
| |
|
| RegularHessianFactor (const GaussianFactorGraph &factors, const Scatter &scatter) |
| | Construct from a GaussianFactorGraph.
|
| |
|
| RegularHessianFactor (const GaussianFactorGraph &factors) |
| | Construct from a GaussianFactorGraph.
|
| |
| void | multiplyHessianAdd (double alpha, const VectorValues &x, VectorValues &y) const override |
| | y += alpha * A'*A*x More...
|
| |
|
void | multiplyHessianAdd (double alpha, const double *x, double *yvalues) const |
| | y += alpha * A'*A*x
|
| |
|
void | multiplyHessianAdd (double alpha, const double *x, double *yvalues, std::vector< size_t > offsets) const |
| | Raw memory version, with offsets TODO document reasoning.
|
| |
| void | hessianDiagonal (double *d) const override |
| | Return the diagonal of the Hessian for this factor (raw memory version) More...
|
| |
| void | gradientAtZero (double *d) const override |
| | Add gradient at zero to d TODO: is it really the goal to add ?? More...
|
| |
|
| HessianFactor () |
| | default constructor for I/O
|
| |
| | HessianFactor (Key j, const Matrix &G, const Vector &g, double f) |
| | Construct a unary factor. More...
|
| |
| | HessianFactor (Key j, const Vector &mu, const Matrix &Sigma) |
| | Construct a unary factor, given a mean and covariance matrix. More...
|
| |
| | HessianFactor (Key j1, Key j2, const Matrix &G11, const Matrix &G12, const Vector &g1, const Matrix &G22, const Vector &g2, double f) |
| | Construct a binary factor. More...
|
| |
| | HessianFactor (Key j1, Key j2, Key j3, const Matrix &G11, const Matrix &G12, const Matrix &G13, const Vector &g1, const Matrix &G22, const Matrix &G23, const Vector &g2, const Matrix &G33, const Vector &g3, double f) |
| | Construct a ternary factor. More...
|
| |
| | HessianFactor (const KeyVector &js, const std::vector< Matrix > &Gs, const std::vector< Vector > &gs, double f) |
| | Construct an n-way factor. More...
|
| |
|
template<typename KEYS > |
| | HessianFactor (const KEYS &keys, const SymmetricBlockMatrix &augmentedInformation) |
| | Constructor with an arbitrary number of keys and with the augmented information matrix specified as a block matrix.
|
| |
|
| HessianFactor (const JacobianFactor &cg) |
| | Construct from a JacobianFactor (or from a GaussianConditional since it derives from it)
|
| |
|
| HessianFactor (const GaussianFactor &factor) |
| | Attempt to construct from any GaussianFactor - currently supports JacobianFactor, HessianFactor, GaussianConditional, or any derived classes.
|
| |
|
| HessianFactor (const GaussianFactorGraph &factors, const Scatter &scatter) |
| | Combine a set of factors into a single dense HessianFactor.
|
| |
|
| HessianFactor (const GaussianFactorGraph &factors) |
| | Combine a set of factors into a single dense HessianFactor.
|
| |
|
| ~HessianFactor () override |
| | Destructor.
|
| |
| GaussianFactor::shared_ptr | clone () const override |
| | Clone this HessianFactor. More...
|
| |
| void | print (const std::string &s="", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| | Print the factor for debugging and testing (implementing Testable) More...
|
| |
| bool | equals (const GaussianFactor &lf, double tol=1e-9) const override |
| | Compare to another factor for testing (implementing Testable) More...
|
| |
| double | error (const VectorValues &c) const override |
| | Evaluate the factor error f(x). More...
|
| |
| DenseIndex | getDim (const_iterator variable) const override |
| | Return the dimension of the variable pointed to by the given key iterator todo: Remove this in favor of keeping track of dimensions with variables? More...
|
| |
|
size_t | rows () const |
| | Return the number of columns and rows of the Hessian matrix, including the information vector.
|
| |
| GaussianFactor::shared_ptr | negate () const override |
| | Construct the corresponding anti-factor to negate information stored stored in this factor. More...
|
| |
| bool | empty () const override |
| | Check if the factor is empty. More...
|
| |
| double | constantTerm () const |
| | Return the constant term \( f \) as described above. More...
|
| |
| double & | constantTerm () |
| | Return the constant term \( f \) as described above. More...
|
| |
| SymmetricBlockMatrix::constBlock | linearTerm (const_iterator j) const |
| | Return the part of linear term \( g \) as described above corresponding to the requested variable. More...
|
| |
| SymmetricBlockMatrix::constBlock | linearTerm () const |
| | Return the complete linear term \( g \) as described above. More...
|
| |
| SymmetricBlockMatrix::Block | linearTerm () |
| | Return the complete linear term \( g \) as described above. More...
|
| |
|
const SymmetricBlockMatrix & | info () const |
| | Return underlying information matrix.
|
| |
| SymmetricBlockMatrix & | info () |
| | Return non-const information matrix. More...
|
| |
| Matrix | augmentedInformation () const override |
| | Return the augmented information matrix represented by this GaussianFactor. More...
|
| |
|
Eigen::SelfAdjointView< SymmetricBlockMatrix::constBlock, Eigen::Upper > | informationView () const |
| | Return self-adjoint view onto the information matrix (NOT augmented).
|
| |
| Matrix | information () const override |
| | Return the non-augmented information matrix represented by this GaussianFactor. More...
|
| |
| void | hessianDiagonalAdd (VectorValues &d) const override |
| | Add the current diagonal to a VectorValues instance. More...
|
| |
| void | hessianDiagonal (double *d) const override |
| | Raw memory access version of hessianDiagonal. More...
|
| |
| std::map< Key, Matrix > | hessianBlockDiagonal () const override |
| | Return the block diagonal of the Hessian for this factor. More...
|
| |
| std::pair< Matrix, Vector > | jacobian () const override |
| | Return (dense) matrix associated with factor. More...
|
| |
| Matrix | augmentedJacobian () const override |
| | Return (dense) matrix associated with factor The returned system is an augmented matrix: [A b]. More...
|
| |
| void | updateHessian (const KeyVector &keys, SymmetricBlockMatrix *info) const override |
| | Update an information matrix by adding the information corresponding to this factor (used internally during elimination). More...
|
| |
| void | updateHessian (HessianFactor *other) const |
| | Update another Hessian factor. More...
|
| |
| void | multiplyHessianAdd (double alpha, const VectorValues &x, VectorValues &y) const override |
| | y += alpha * A'*A*x More...
|
| |
| VectorValues | gradientAtZero () const override |
| | eta for Hessian More...
|
| |
| void | gradientAtZero (double *d) const override |
| | Raw memory access version of gradientAtZero. More...
|
| |
| Vector | gradient (Key key, const VectorValues &x) const override |
| | Compute the gradient at a key: \grad f(x_i) = \sum_j G_ij*x_j - g_i. More...
|
| |
| boost::shared_ptr< GaussianConditional > | eliminateCholesky (const Ordering &keys) |
| | In-place elimination that returns a conditional on (ordered) keys specified, and leaves this factor to be on the remaining keys (separator) only. More...
|
| |
|
VectorValues | solve () |
| | Solve the system A'*A delta = A'*b in-place, return delta as VectorValues.
|
| |
|
| GaussianFactor () |
| | Default constructor creates empty factor.
|
| |
| template<typename CONTAINER > |
| | GaussianFactor (const CONTAINER &keys) |
| | Construct from container of keys. More...
|
| |
|
virtual | ~GaussianFactor () |
| | Destructor.
|
| |
| void | print (const std::string &s="", const KeyFormatter &formatter=DefaultKeyFormatter) const override=0 |
| | print More...
|
| |
| virtual bool | equals (const GaussianFactor &lf, double tol=1e-9) const =0 |
| | Equals for testable. More...
|
| |
| virtual double | error (const VectorValues &c) const =0 |
| | Print for testable. More...
|
| |
| virtual DenseIndex | getDim (const_iterator variable) const =0 |
| | 0.5*(A*x-b)'D(A*x-b) More...
|
| |
| virtual Matrix | augmentedJacobian () const =0 |
| | Return a dense \( [ \;A\;b\; ] \in \mathbb{R}^{m \times n+1} \) Jacobian matrix, augmented with b with the noise models baked into A and b. More...
|
| |
| virtual std::pair< Matrix, Vector > | jacobian () const =0 |
| | Return the dense Jacobian \( A \) and right-hand-side \( b \), with the noise models baked into A and b. More...
|
| |
| virtual Matrix | augmentedInformation () const =0 |
| | Return the augmented information matrix represented by this GaussianFactor. More...
|
| |
| virtual Matrix | information () const =0 |
| | Return the non-augmented information matrix represented by this GaussianFactor. More...
|
| |
|
VectorValues | hessianDiagonal () const |
| | Return the diagonal of the Hessian for this factor.
|
| |
| virtual void | hessianDiagonalAdd (VectorValues &d) const =0 |
| | Add the current diagonal to a VectorValues instance. More...
|
| |
| virtual void | hessianDiagonal (double *d) const =0 |
| | Raw memory access version of hessianDiagonal. More...
|
| |
| virtual std::map< Key, Matrix > | hessianBlockDiagonal () const =0 |
| | Return the block diagonal of the Hessian for this factor. More...
|
| |
| virtual GaussianFactor::shared_ptr | clone () const =0 |
| | Clone a factor (make a deep copy) More...
|
| |
| virtual bool | empty () const =0 |
| | Test whether the factor is empty. More...
|
| |
| virtual GaussianFactor::shared_ptr | negate () const =0 |
| | Construct the corresponding anti-factor to negate information stored stored in this factor. More...
|
| |
| virtual void | updateHessian (const KeyVector &keys, SymmetricBlockMatrix *info) const =0 |
| | Update an information matrix by adding the information corresponding to this factor (used internally during elimination). More...
|
| |
| virtual void | multiplyHessianAdd (double alpha, const VectorValues &x, VectorValues &y) const =0 |
| | y += alpha * A'*A*x More...
|
| |
| virtual VectorValues | gradientAtZero () const =0 |
| | A'*b for Jacobian, eta for Hessian. More...
|
| |
| virtual void | gradientAtZero (double *d) const =0 |
| | Raw memory access version of gradientAtZero. More...
|
| |
| virtual Vector | gradient (Key key, const VectorValues &x) const =0 |
| | Gradient wrt a key at any values. More...
|
| |
|
virtual | ~Factor ()=default |
| | Default destructor.
|
| |
| KeyVector & | keys () |
| |
|
iterator | begin () |
| | Iterator at beginning of involved variable keys.
|
| |
|
iterator | end () |
| | Iterator at end of involved variable keys.
|
| |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print only keys More...
|
| |
|
Key | front () const |
| | First key.
|
| |
|
Key | back () const |
| | Last key.
|
| |
|
const_iterator | find (Key key) const |
| | find
|
| |
|
const KeyVector & | keys () const |
| | Access the factor's involved variable keys.
|
| |
|
const_iterator | begin () const |
| | Iterator at beginning of involved variable keys.
|
| |
|
const_iterator | end () const |
| | Iterator at end of involved variable keys.
|
| |
| size_t | size () const |
| |
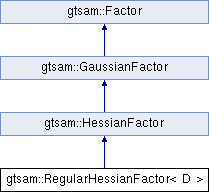
 Inheritance diagram for gtsam::RegularHessianFactor< D >:
Inheritance diagram for gtsam::RegularHessianFactor< D >: