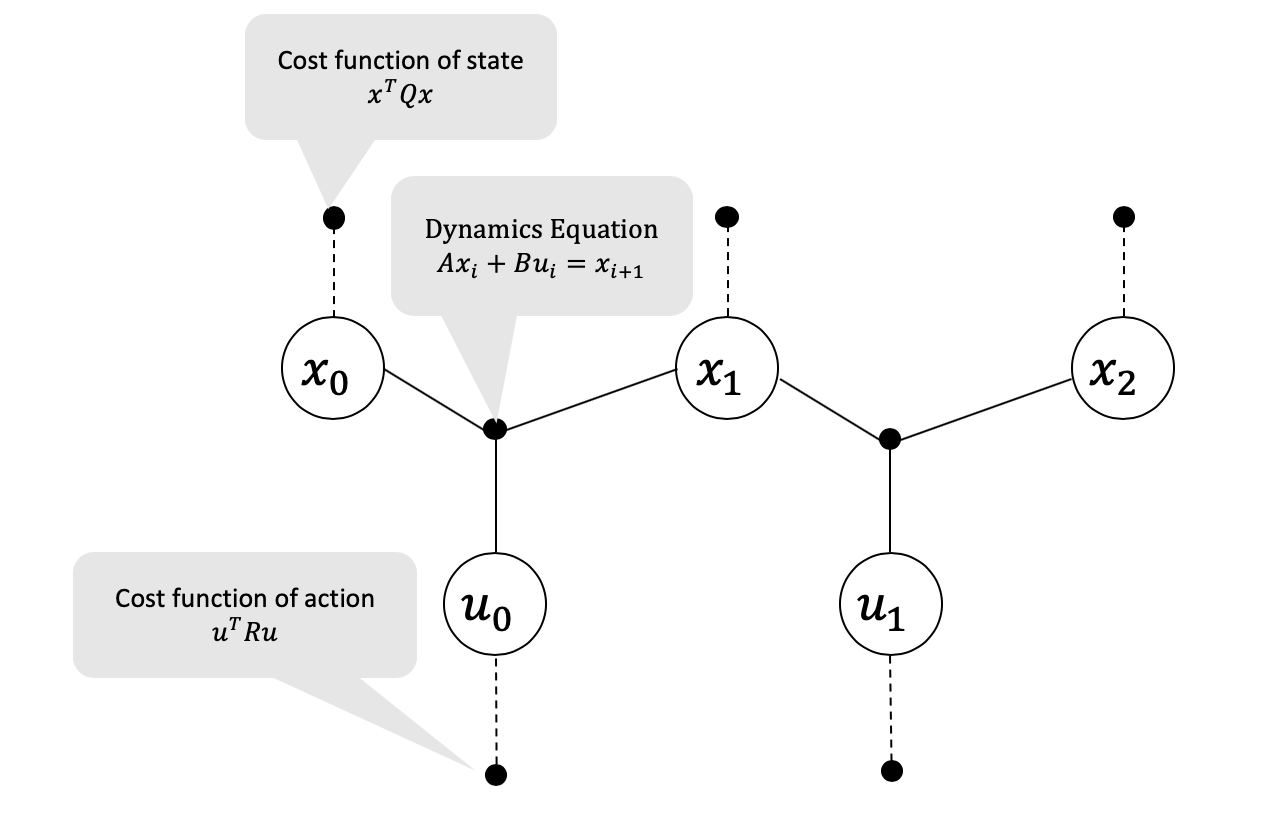
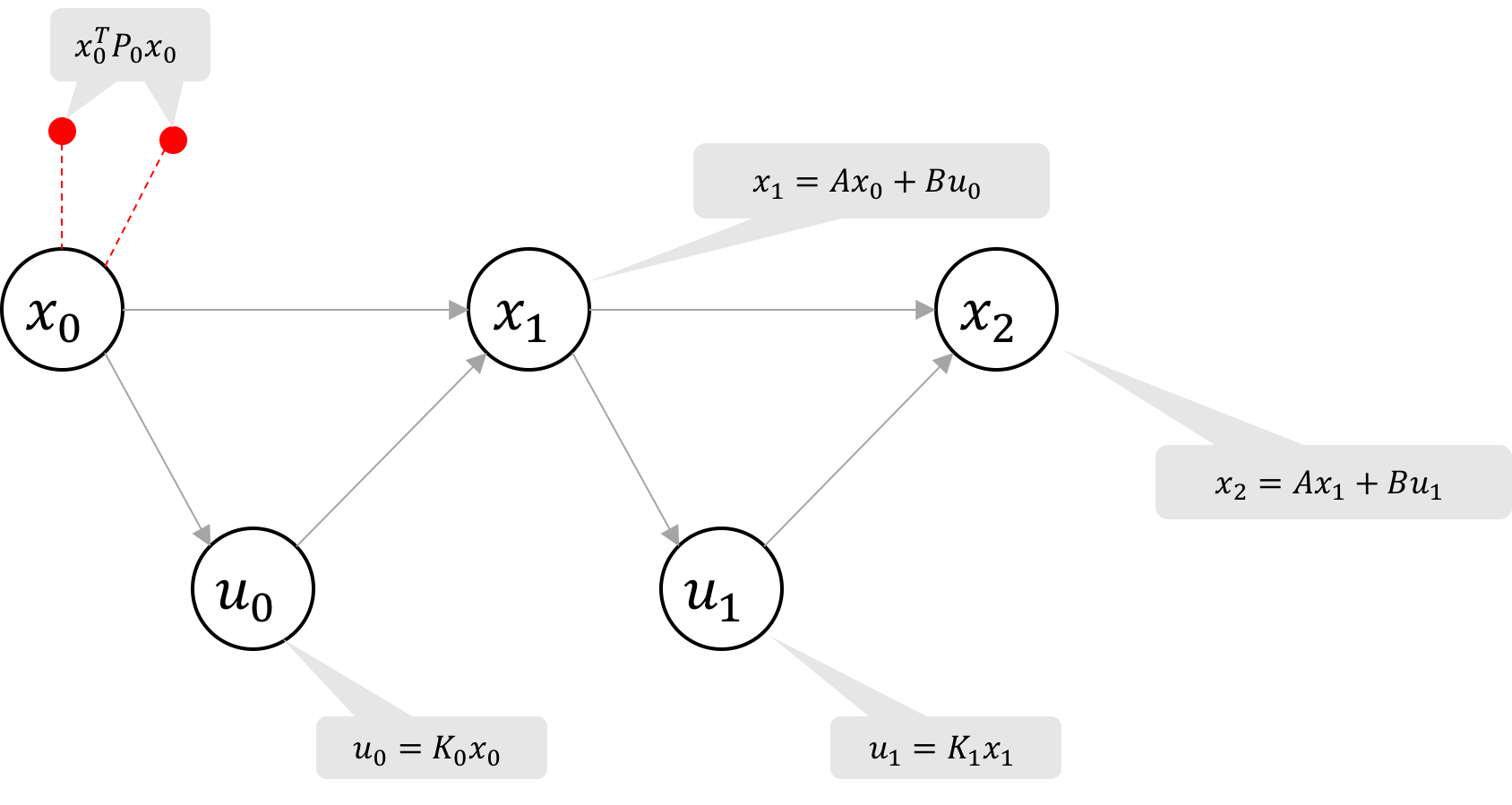
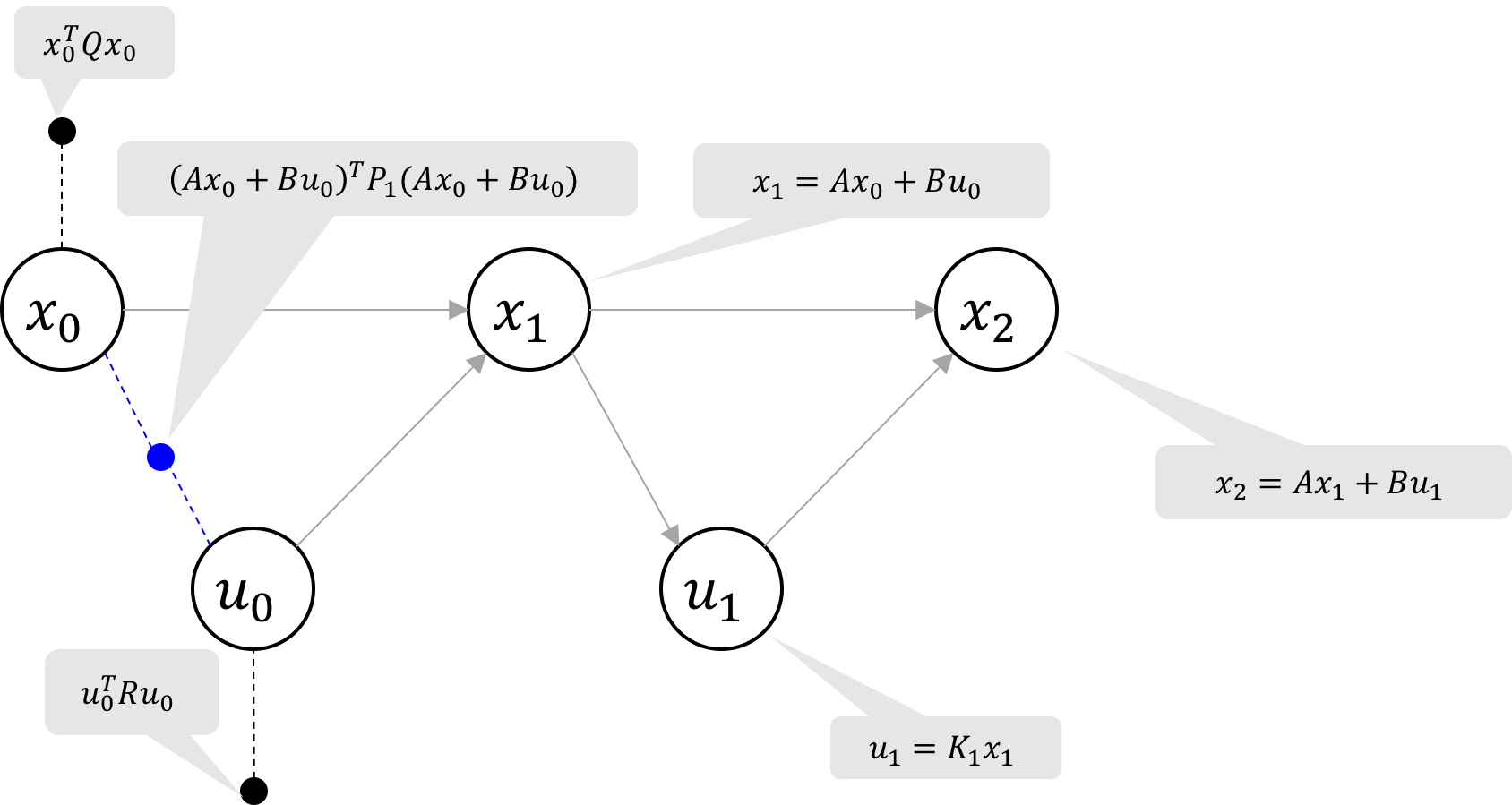
Figure 1 Factor graph structure for an LQR problem with 3 time steps. The cost factors are marked with dashed lines and the dynamics constraint factors are marked with solid lines.
In this post we explain how optimal control problems can be formulated as factor graphs and solved
by performing variable elimination on the factor graph.
Specifically, we will show the factor graph formulation and solution for the
Linear Quadratic Regulator (LQR). LQR is a state feedback controller which derives the optimal gains
for a linear system with quadratic costs on control effort and state error.
We consider the finite-horizon, discrete LQR
problem.
The task is to find the optimal controls u_k at time instances t_k
so that a total cost is minimized. Note that we will later see the optimal controls can be represented in the form u^*_k = K_kx_k for some optimal gain matrices K_k. The LQR problem can be represented as a constrained optimization
problem where the costs of control and state error are represented by the
minimization objective \eqref{eq:cost}, and the system dynamics are represented by the
constraints \eqref{eq:dyn_model}.
We can visualize the objective function and constraints in the form of a factor
graph as shown in Figure 1. This is a simple Markov chain, with the oldest
states and controls on the left, and the newest states and controls on the right. The
ternary factors represent the dynamics model constraints and the unary
factors represent the state and control costs we seek to minimize via least-squares.
Variable Elimination
To optimize the factor graph, which represents minimizing the least squares objectives above, we can simply eliminate the factors from right
to left. In this section we demonstrate the variable elimination graphically and algebraically, but the matrix elimination is also
provided in the Appendix.
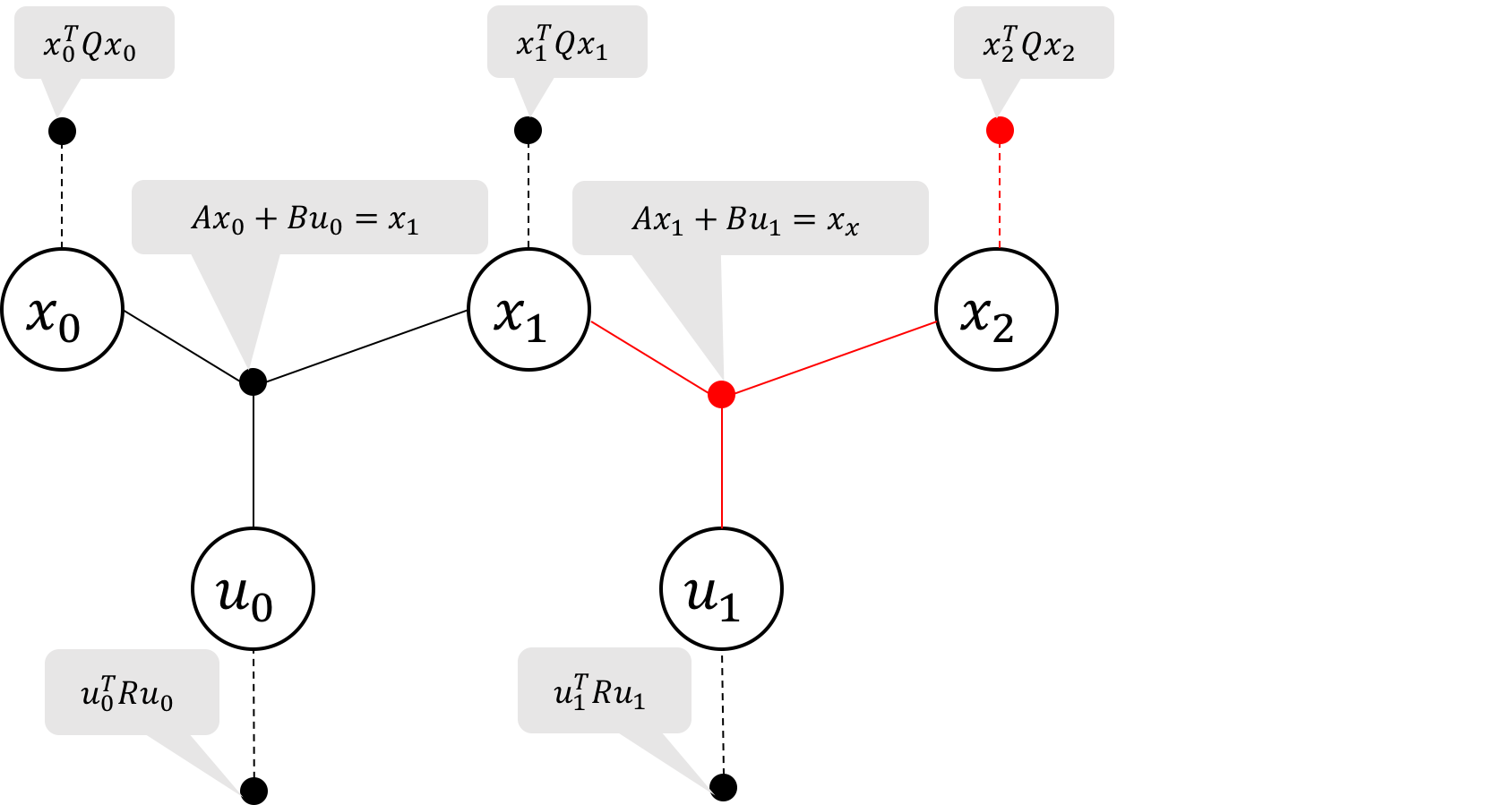
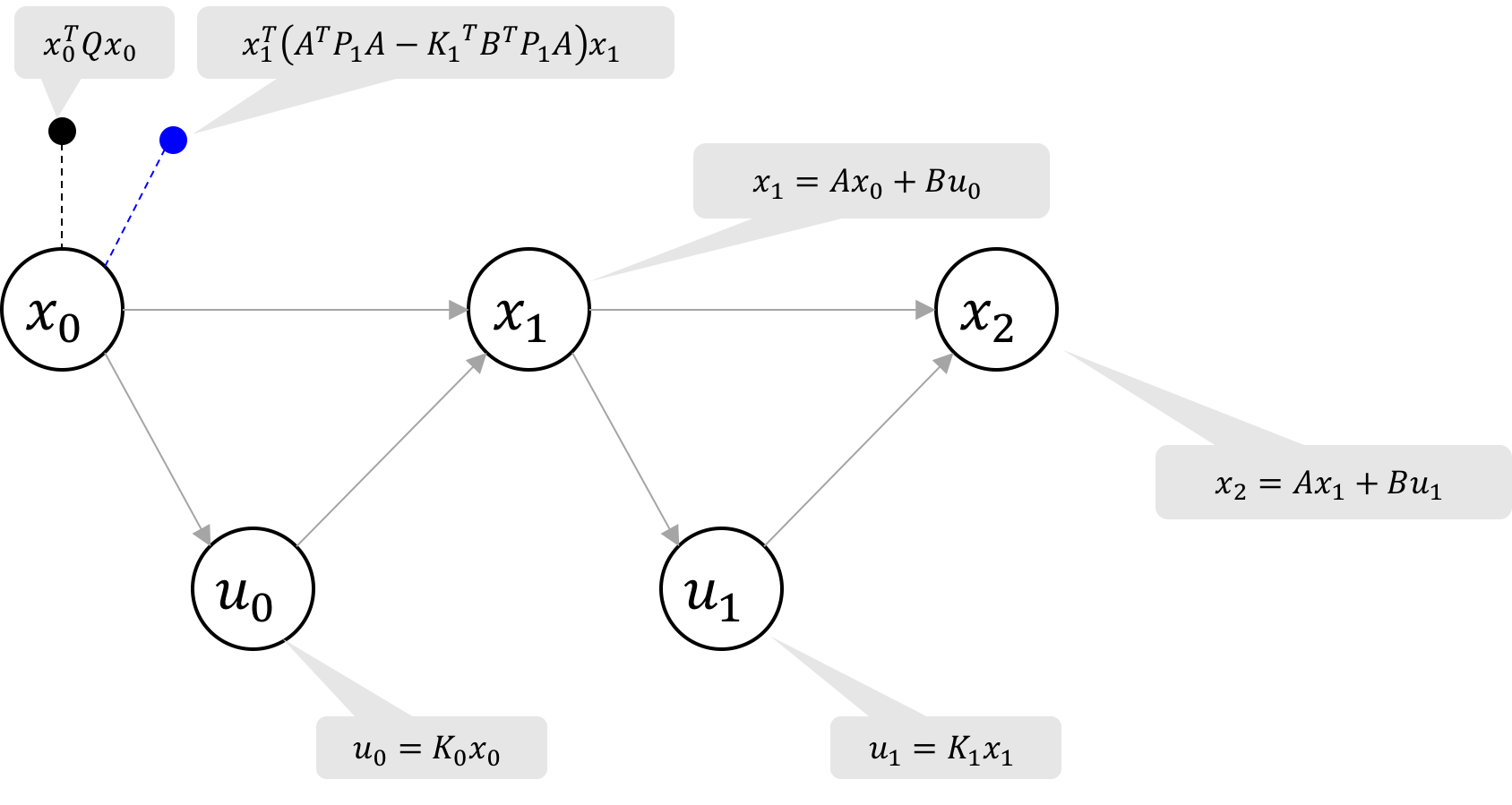
Figure 2a Elimination of state x_2
Figure 2b Elimination of state x_2
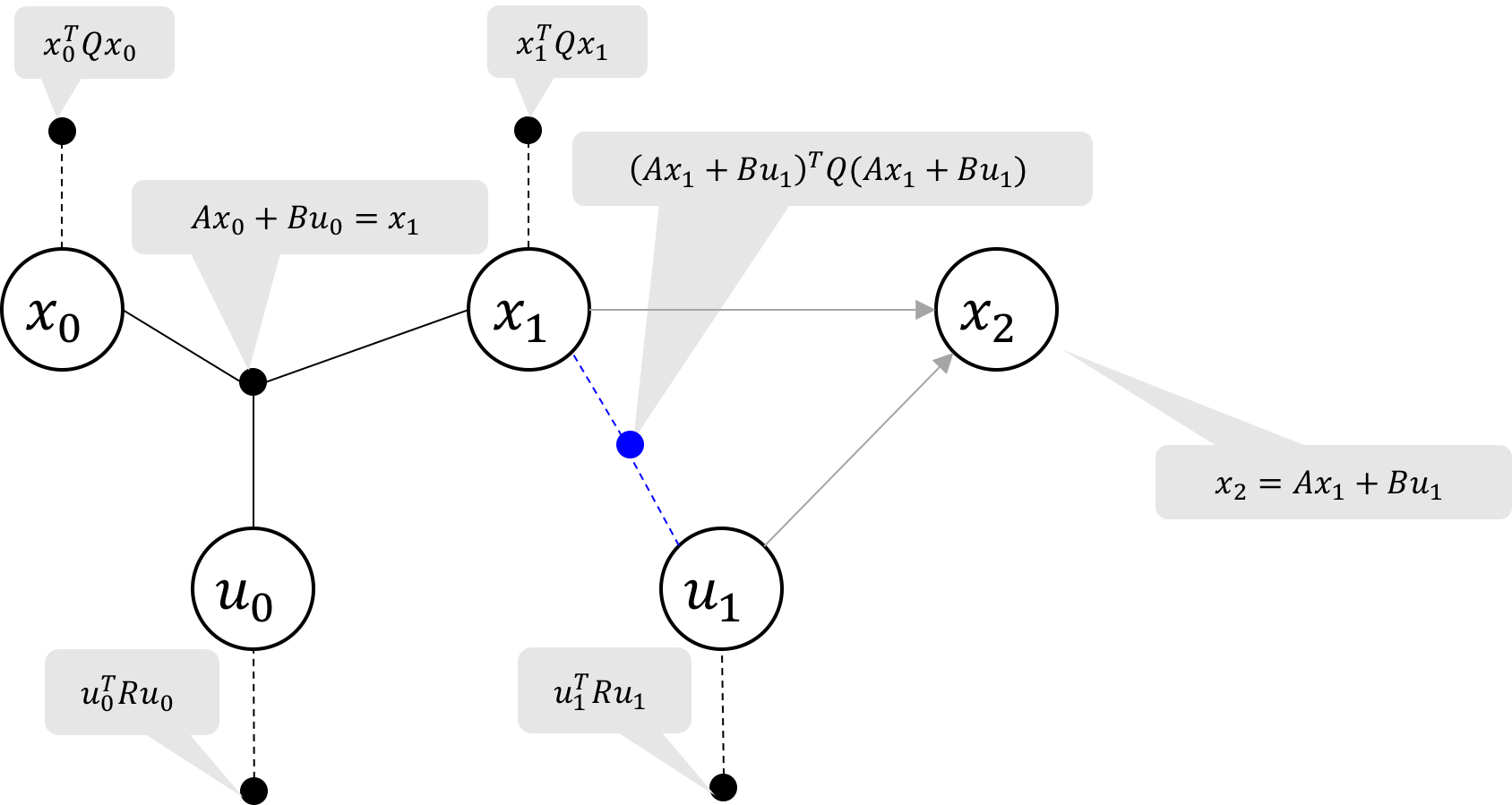
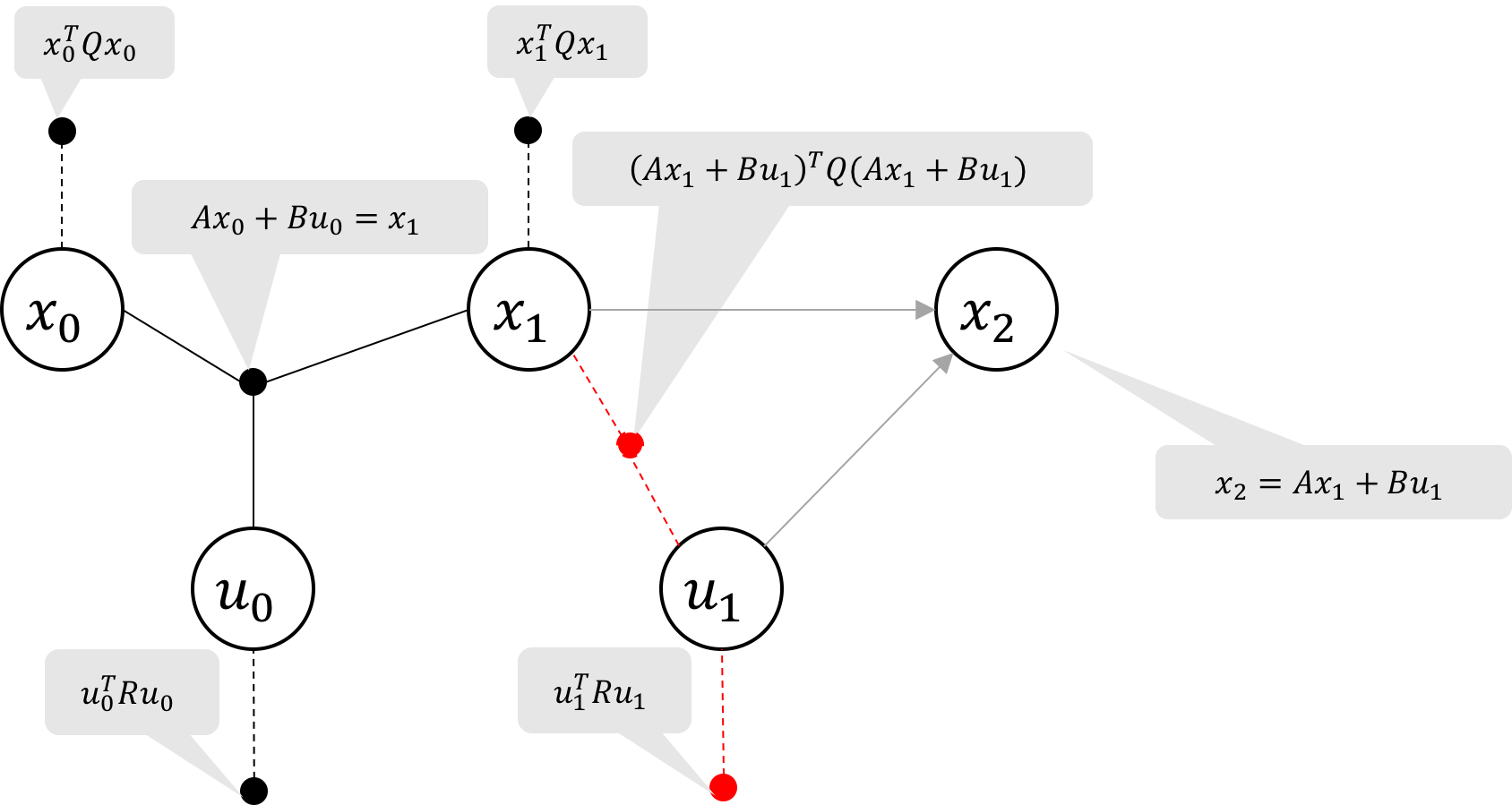
Figure 3a Elimination of state u_1
Figure 3b Elimination of state u_1
Figure 3c Cost-to-go at x_1 is the sum of the two unary factors on x_1 (green)
Figure 4a Repeat elimination until the graph is reduced to a Bayes net
Figure 4b Repeat elimination until the graph is reduced to a Bayes net
Figure 4c Repeat elimination until the graph is reduced to a Bayes net
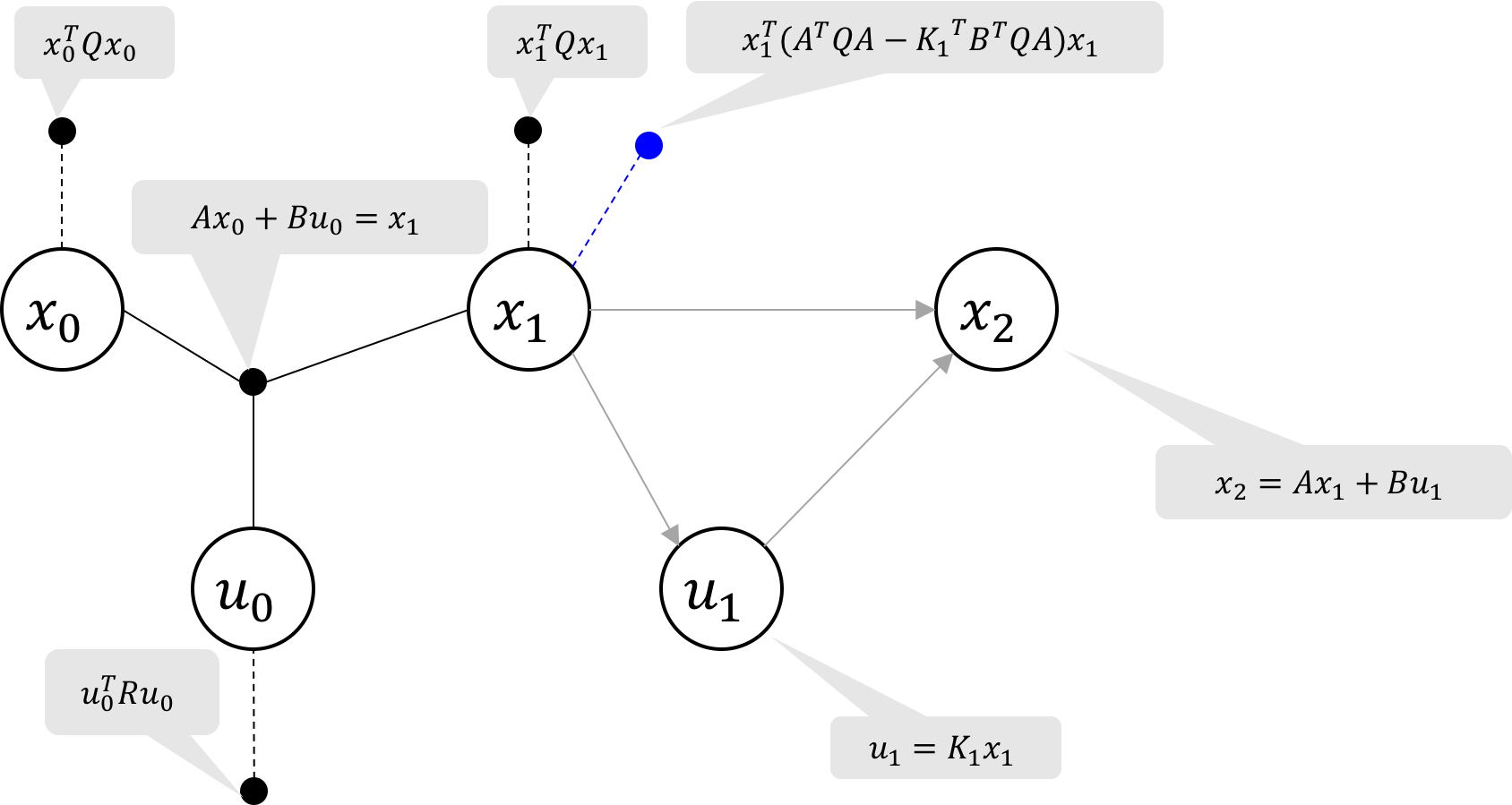
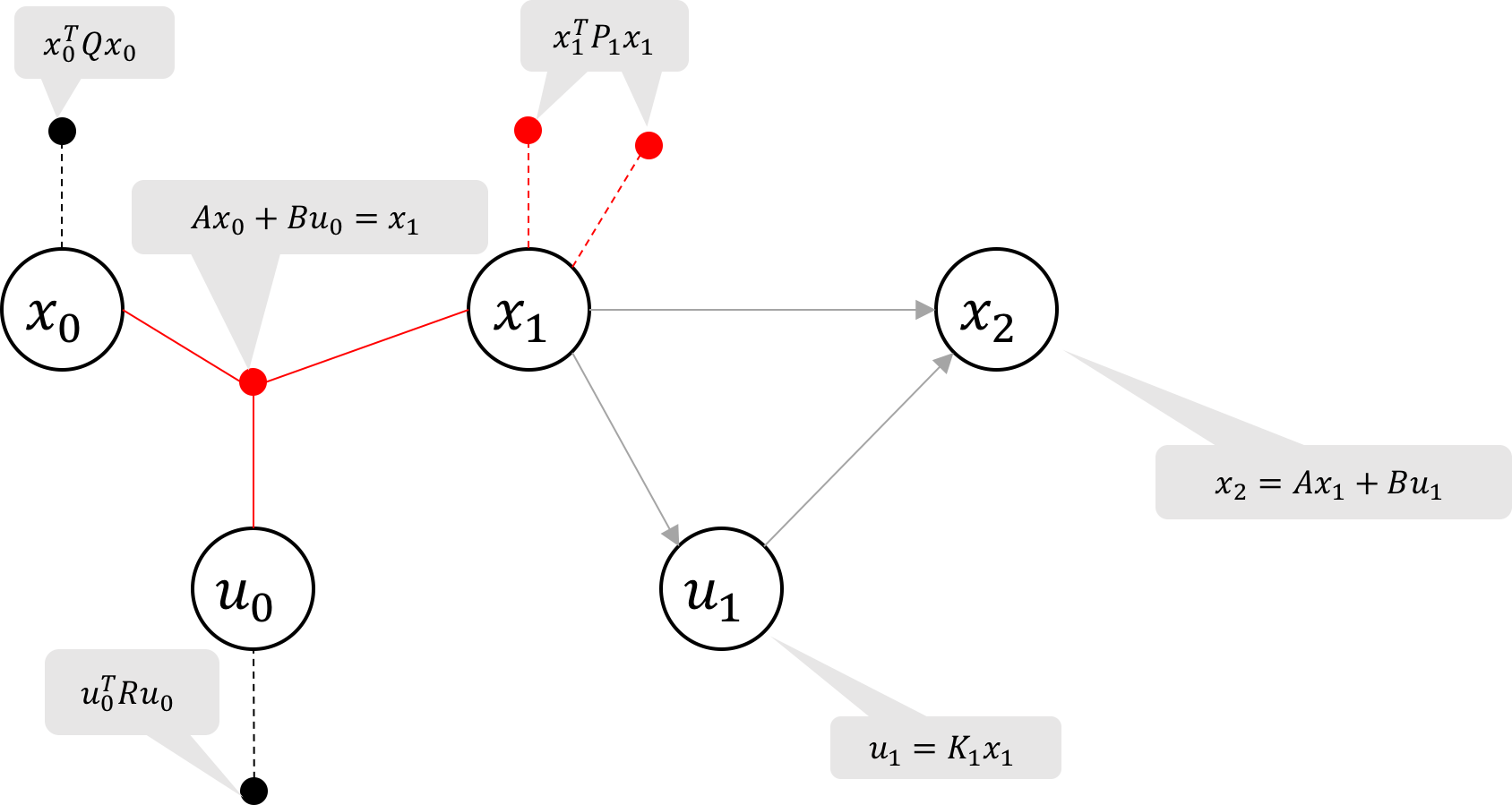
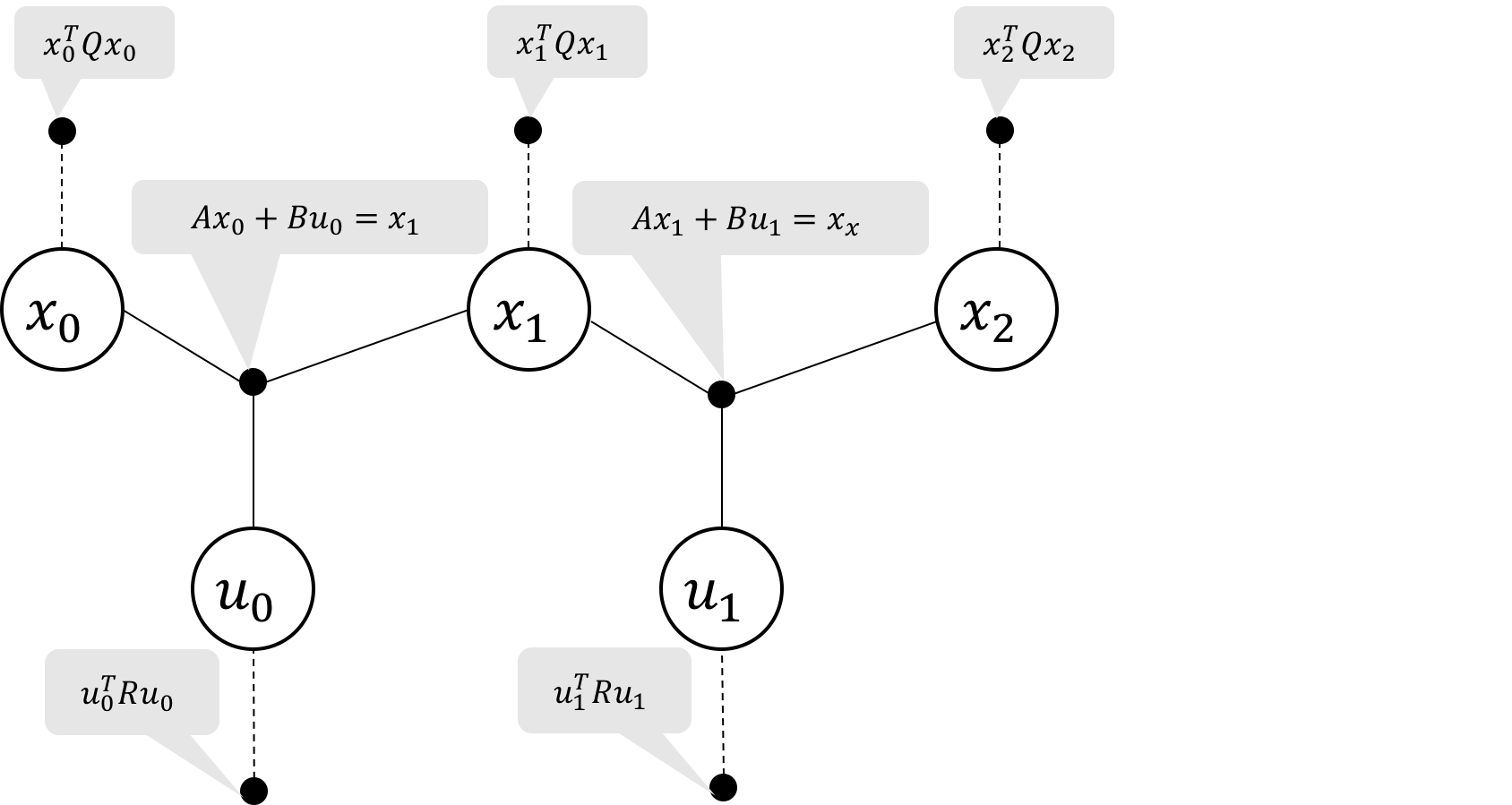
Let us start at the last state, x_2. Gathering the two factors (marked in
red Figure 2a), we have \eqref{eq:potential} the objective function \phi_1, and \eqref{eq:constrain} the constraint equation on x_2, u_1 and x_1:
By substituting x_2 from the dynamics constraint \eqref{eq:constrain} into the objective function
\eqref{eq:potential}, we create a new factor representing
the cost of state x_2 as a function of x_1 and u_1:
The resulting factor graph is illustrated in Figure 2b. Note that the
dynamics constraint is now represented by the bayes net factors shown as gray arrows.
To summarize, we used the dynamics constraint to eliminate variable
x_2 and the two factors marked in red, and we replaced them with a new binary cost factor on x_1
and u_1, marked in blue.
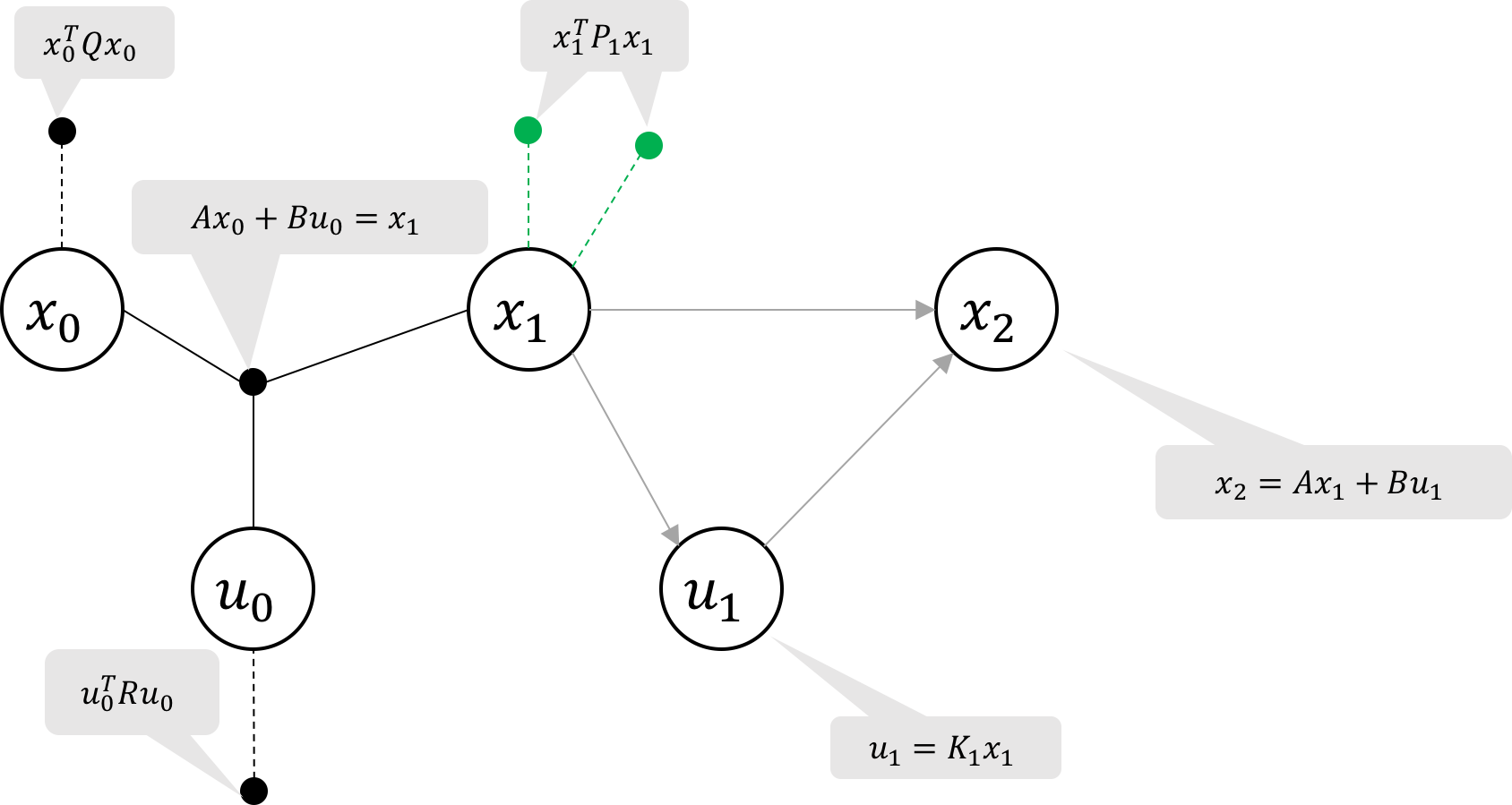
To eliminate u_1, we seek to replace the two factors marked red in Figure 3a
with a new cost factor on x_1 and an equation for the optimal control u_1^*(x_1).
Adding the control cost to \eqref{eq:potential_simplified}, the combined cost of the
two red factors in Figure 3a is given by:
\phi_3 is sometimes referred to as the optimal action value function and we seek to minimize it over u_1.
We do so by
setting the derivative of \eqref{eq:potential_u1} wrt u_1 to zero
yielding the expression for the optimal control input u_1^* as
Finally, we substitute the expression of our optimal control, u_1^* = K_1x_1,
into our potential \eqref{eq:potential_u1}
to obtain a new unary cost factor on x_1:
\begin{align}
\phi_4(x_1) &= \phi_3(x_1, u_1^*(x_1)) \nonumber \\
&= (K_1x_1)^T RK_1x_1 + (Ax_1 + BKx_1)^T Q (Ax_1 + BKx_1) \nonumber \\
&= x_1^T(A^TQA-K_1^TB^TQA)x_1 \label{eq:potential_x1}
\end{align}
Note that we simplified K_1^TRK_1 + K_1^TB^TQBK_1 = -K_1^TB^TQA by substituting in for K_1 using
\eqref{eq:control_law}.
The resulting factor graph is illustrated in Figure 3b.
For convenience, we will also define P_k where x_k^TP_kx_k represents the aggregate of the two unary costs on x_k. In the case of P_1,
\begin{align}
x_1^TP_1x_1 &= x_1^TQx_1 + \phi_4(x_1) \nonumber
\end{align}
is the aggregation of the two unary factors labeled in green in Figure 3c.
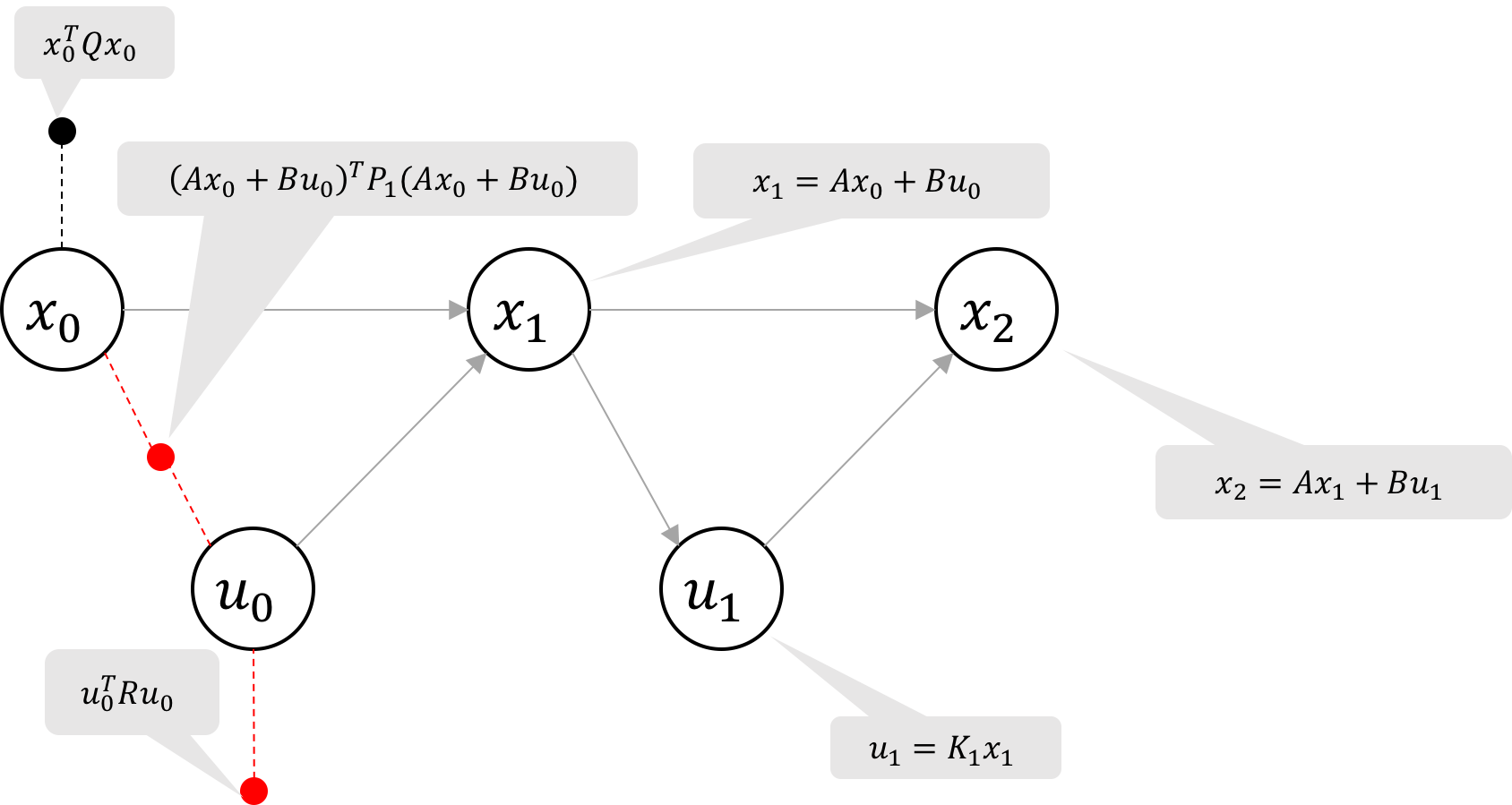
By eliminating all the variables from right to left, we can get a Bayes network
as shown in Figure 4d. Each time we eliminate a state
and control, we simply repeat the steps in Eliminate a state and Eliminate a control: we express the state x_{k+1} with the dynamics model, then find the optimal control u_k as
a function of state x_k.
Eliminating a general state, x_{k+1}, and control u_k, we obtain the recurrence relations:
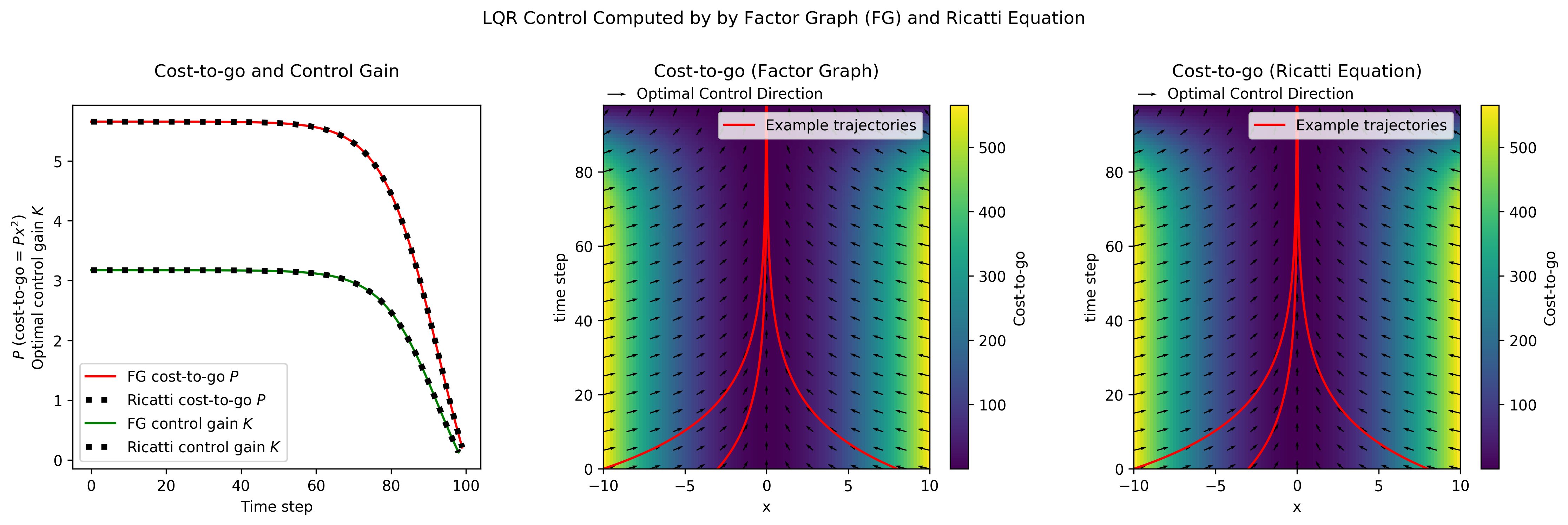
Figure 5 Example LQR control solutions as solved by factor graphs (middle) and the traditional Discrete Algebraic Ricatti Equations (right). The optimal control gains and cost-to-go factors are compared (left). All plots show exact agreement between factor graph and Ricatti equation solutions.
We introduce the cost-to-go (also known as return cost, optimal state value function, or simply value function) as V_k(x) \coloneqq x^TP_kx which intuitively represents the total cost that will be accrued from here on out, assuming optimal control.
In our factor graph representation, it is becomes obvious that V_k(x) corresponds to the total cost at and after the state x_k assuming optimal control because we eliminate variables backwards in time with the objective of minimizing cost.
Eliminating a state just re-expresses the future cost in terms of prior states/controls. Each time we eliminate a control, u, the future cost is recalculated assuming optimal control (i.e. \phi_4(x) = \phi_3(x, u^*)).
This “cost-to-go” is depicted as a heatmap in Figure 5.
The heat maps depict the V_k showing that the cost is high when x is far from 0, but also showing that after iterating sufficient far backwards in time, V_k(x) begins to converge. That is to say, the V_0(x) is very similar for N=30 and N=100.
Similarly, the leftmost plot of Figure 5 depicts K_k and P_k and shows that they (predictably) converge as well.
This convergence allows us to see that we can extend to the infinite horizon LQR problem (continued in the next section).
Equivalence to the Ricatti Equation
In traditional descriptions of discrete, finite-horizon LQR (i.e. Chow, Kirk, Stanford), the control law and cost function are given by
with P_k commonly referred to as the solution to the dynamic Ricatti equation and P_N=Q is the
value of the Ricatti function at the final time step.
\eqref{eq:control_update_k_ricatti} and \eqref{eq:cost_update_k_ricatti} correspond to
the same results as we derived in \eqref{eq:control_update_k} and \eqref{eq:cost_update_k}
respectively.
Recall that P_0 and K_0 appear to converge as the number of time steps grows. They will approach a stationary solution to the equations
\begin{align}
K &= -(R+B^TPB)^{-1}B^TPA \nonumber \\
P &= Q+A^TPA - K^TB^TPA \nonumber
\end{align}
as N\to\infty. This is the Discrete Algebraic Ricatti Equations (DARE) and \lim_{N\to\infty}V_0(x) and \lim_{N\to\infty}K_0 are the cost-to-go and optimal control gain respectively for the infinite horizon LQR problem. Indeed, one way to calculate the solution to the DARE is to iterate on the dynamic Ricatti equation.
Implementation using GTSAM
**Edit (Apr 17, 2021): Code updated to new Python wrapper as of GTSAM 4.1.0.
You can view an example Jupyter notebook on google colab or
download the modules/examples
that you can use in your
projects to:
Calculate the closed loop gain matrix, K, using GTSAM
Calculate the “cost-to-go” matrix, P (which is equivalent to the solutions to
the dynamic Ricatti equation), using GTSAM
Calculate the LQR solution for a non-zero, non-constant goal position, using GTSAM
Visualize the cost-to-go and how it relates to factor graphs and the Ricatti
equation
and more!
A brief example of the open-loop finite horizon LQR problem using
factor graphs is shown below:
defsolve_lqr(A,B,Q,R,X0=np.array([0.,0.]),num_time_steps=500):'''Solves a discrete, finite horizon LQR problem given system dynamics in
state space representation.
Arguments:
A, B: nxn state transition matrix and nxp control input matrix
Q, R: nxn state cost matrix and pxp control cost matrix
X0: initial state (n-vector)
num_time_steps: number of time steps, T
Returns:
x_sol, u_sol: Txn array of states and Txp array of controls
'''n=np.size(A,0)p=np.size(B,1)# noise models
prior_noise=gtsam.noiseModel.Constrained.All(n)dynamics_noise=gtsam.noiseModel.Constrained.All(n)q_noise=gtsam.noiseModel.Gaussian.Information(Q)r_noise=gtsam.noiseModel.Gaussian.Information(R)# Create an empty Gaussian factor graph
graph=gtsam.GaussianFactorGraph()# Create the keys corresponding to unknown variables in the factor graph
X=[]U=[]forkinrange(num_time_steps):X.append(gtsam.symbol('x',k))U.append(gtsam.symbol('u',k))# set initial state as prior
graph.add(X[0],np.eye(n),X0,prior_noise)# Add dynamics constraint as ternary factor
# A.x1 + B.u1 - I.x2 = 0
forkinrange(num_time_steps-1):graph.add(X[k],A,U[k],B,X[k+1],-np.eye(n),np.zeros((n)),dynamics_noise)# Add cost functions as unary factors
forxinX:graph.add(x,np.eye(n),np.zeros(n),q_noise)foruinU:graph.add(u,np.eye(p),np.zeros(p),r_noise)# Solve
result=graph.optimize()x_sol=np.zeros((num_time_steps,n))u_sol=np.zeros((num_time_steps,p))forkinrange(num_time_steps):x_sol[k,:]=result.at(X[k])u_sol[k]=result.at(U[k])returnx_sol,u_sol
Future Work
The factor graph (Figure 1) for our finite horizon discrete LQR problem can be readily extended to LQG, iLQR, DDP, and reinforcement
learning using non-deterministic dynamics factors, nonlinear factors, discrete factor graphs, and other features of GTSAM (stay tuned for future posts).
Appendix
Least Squares Implementation in GTSAM
GTSAM can be specified to use either of two methods for solving the least squares problems that
appear in eliminating factor graphs: Cholesky Factorization or QR Factorization. Both arrive at the same result, but we will take a look at QR since it more immediately illustrates the elimination algorithm at work.
The factorization process is illustrated in Figure 6 for a 3-time step factor graph, where the noise matrices and elimination
matrices are shown with the corresponding states of the graph. The noise matrix (NM) is 0 for a
hard constraint and I for a minimization objective. The elimination matrix is formatted as an
augmented matrix [A|b] for the linear least squares problem \argmin\limits_x||Ax-b||_2^2
with {x=[x_2;u_1;x_1;u_0;x_0]} is the vertical concatenation of all state and control vectors.
The recursive expressions for P, D, and K when eliminating control variables (i.e. u_1 in Figure 6e) are derived from block QR Factorization.
Note that all b_i=0 in the augmented matrix for the LQR problem of finding minimal control to
reach state 0, but simply changing values of b_i intuitively extends GTSAM to solve
LQR problems whose objectives are to reach different states or even follow trajectories.