Unit: i.i.d.
unit-variance noise on all m dimensions.
|
|
virtual bool | isUnit () const |
| | true if a unit noise model, saves slow/clumsy dynamic casting
|
| |
|
virtual void | print (const std::string &name) const |
| |
|
virtual double | Mahalanobis (const Vector &v) const |
| | Mahalanobis distance v'*R'*R*v = <R*v,R*v>
|
| |
|
virtual Vector | whiten (const Vector &v) const |
| | Whiten an error vector.
|
| |
|
virtual Vector | unwhiten (const Vector &v) const |
| | Unwhiten an error vector.
|
| |
|
virtual Matrix | Whiten (const Matrix &H) const |
| | Multiply a derivative with R (derivative of whiten) Equivalent to whitening each column of the input matrix.
|
| |
|
virtual void | WhitenInPlace (Matrix &) const |
| | In-place version.
|
| |
|
virtual void | WhitenInPlace (Eigen::Block< Matrix >) const |
| | In-place version.
|
| |
|
virtual void | whitenInPlace (Vector &) const |
| | in-place whiten, override if can be done more efficiently
|
| |
|
virtual void | unwhitenInPlace (Vector &) const |
| | in-place unwhiten, override if can be done more efficiently
|
| |
|
virtual void | whitenInPlace (Eigen::Block< Vector > &) const |
| | in-place whiten, override if can be done more efficiently
|
| |
|
virtual void | unwhitenInPlace (Eigen::Block< Vector > &) const |
| | in-place unwhiten, override if can be done more efficiently
|
| |
|
double | sigma () const |
| | Return standard deviation.
|
| |
|
virtual Vector | sigmas () const |
| | Calculate standard deviations.
|
| |
|
double | sigma (size_t i) const |
| | Return standard deviations (sqrt of diagonal)
|
| |
|
const Vector & | invsigmas () const |
| | Return sqrt precisions.
|
| |
|
double | invsigma (size_t i) const |
| |
|
const Vector & | precisions () const |
| | Return precisions.
|
| |
|
double | precision (size_t i) const |
| |
|
virtual Matrix | R () const |
| | Return R itself, but note that Whiten(H) is cheaper than R*H.
|
| |
|
virtual bool | equals (const Base &expected, double tol=1e-9) const |
| |
|
virtual double | distance (const Vector &v) const |
| |
|
virtual void | WhitenSystem (std::vector< Matrix > &A, Vector &b) const |
| | Whiten a system, in place as well.
|
| |
|
virtual void | WhitenSystem (Matrix &A, Vector &b) const |
| |
|
virtual void | WhitenSystem (Matrix &A1, Matrix &A2, Vector &b) const |
| |
|
virtual void | WhitenSystem (Matrix &A1, Matrix &A2, Matrix &A3, Vector &b) const |
| |
| virtual boost::shared_ptr< Diagonal > | QR (Matrix &Ab) const |
| | Apply appropriately weighted QR factorization to the system [A b] Q' * [A b] = [R d] Dimensions: (r*m) * m*(n+1) = r*(n+1), where r = min(m,n). More...
|
| |
|
virtual Matrix | information () const |
| | Compute information matrix.
|
| |
|
virtual Matrix | covariance () const |
| | Compute covariance matrix.
|
| |
| | Base (size_t dim=1) |
| | primary constructor More...
|
| |
|
virtual bool | isConstrained () const |
| | true if a constrained noise model, saves slow/clumsy dynamic casting
|
| |
|
size_t | dim () const |
| | Dimensionality.
|
| |
|
|
static shared_ptr | Create (size_t dim) |
| | Create a unit covariance noise model.
|
| |
|
static shared_ptr | Sigma (size_t dim, double sigma, bool smart=true) |
| | An isotropic noise model created by specifying a standard devation sigma.
|
| |
| static shared_ptr | Variance (size_t dim, double variance, bool smart=true) |
| | An isotropic noise model created by specifying a variance = sigma^2. More...
|
| |
|
static shared_ptr | Precision (size_t dim, double precision, bool smart=true) |
| | An isotropic noise model created by specifying a precision.
|
| |
| static shared_ptr | Sigmas (const Vector &sigmas, bool smart=true) |
| | A diagonal noise model created by specifying a Vector of sigmas, i.e. More...
|
| |
| static shared_ptr | Variances (const Vector &variances, bool smart=true) |
| | A diagonal noise model created by specifying a Vector of variances, i.e. More...
|
| |
| static shared_ptr | Precisions (const Vector &precisions, bool smart=true) |
| | A diagonal noise model created by specifying a Vector of precisions, i.e. More...
|
| |
| static shared_ptr | SqrtInformation (const Matrix &R, bool smart=true) |
| | A Gaussian noise model created by specifying a square root information matrix. More...
|
| |
| static shared_ptr | Information (const Matrix &M, bool smart=true) |
| | A Gaussian noise model created by specifying an information matrix. More...
|
| |
| static shared_ptr | Covariance (const Matrix &covariance, bool smart=true) |
| | A Gaussian noise model created by specifying a covariance matrix. More...
|
| |
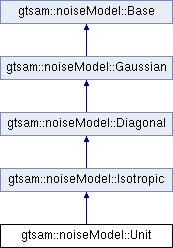
 Inheritance diagram for gtsam::noiseModel::Unit:
Inheritance diagram for gtsam::noiseModel::Unit: