|
|
| SmartRangeFactor () |
| | Default constructor: don't use directly.
|
| |
| | SmartRangeFactor (double s) |
| | Constructor. More...
|
| |
|
void | addRange (Key key, double measuredRange) |
| | Add a range measurement to a pose with given key.
|
| |
|
virtual void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| | print
|
| |
|
virtual bool | equals (const NonlinearFactor &f, double tol=1e-9) const |
| | Check if two factors are equal.
|
| |
|
Point2 | triangulate (const Values &x) const |
| | Triangulate a point from at least three pose-range pairs Checks for best pair that includes first point Raise runtime_error if not well defined.
|
| |
|
virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const |
| | Error function without the NoiseModel, \( z-h(x) \).
|
| |
| virtual gtsam::NonlinearFactor::shared_ptr | clone () const |
| |
◆ SmartRangeFactor()
| gtsam::SmartRangeFactor::SmartRangeFactor |
( |
double |
s | ) |
|
|
inlineexplicit |
Constructor.
- Parameters
-
| s | standard deviation of range measurement noise |
◆ clone()
| virtual gtsam::NonlinearFactor::shared_ptr gtsam::SmartRangeFactor::clone |
( |
| ) |
const |
|
inlinevirtual |
The documentation for this class was generated from the following files:
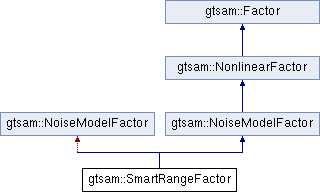
 Inheritance diagram for gtsam::SmartRangeFactor:
Inheritance diagram for gtsam::SmartRangeFactor: