template<class VALUE1, class VALUE2>
class gtsam::NoiseModelFactor2< VALUE1, VALUE2 >
A convenient base class for creating your own NoiseModelFactor with 2 variables.
To derive from this class, implement evaluateError().
|
|
| NoiseModelFactor2 () |
| | Default Constructor for I/O.
|
| |
| | NoiseModelFactor2 (const SharedNoiseModel &noiseModel, Key j1, Key j2) |
| | Constructor. More...
|
| |
|
Key | key1 () const |
| | methods to retrieve both keys
|
| |
|
Key | key2 () const |
| |
| virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const |
| | Calls the 2-key specific version of evaluateError, which is pure virtual so must be implemented in the derived class. More...
|
| |
| virtual Vector | evaluateError (const X1 &, const X2 &, boost::optional< Matrix & > H1=boost::none, boost::optional< Matrix & > H2=boost::none) const =0 |
| | Override this method to finish implementing a binary factor. More...
|
| |
|
| NoiseModelFactor () |
| | Default constructor for I/O only.
|
| |
|
virtual | ~NoiseModelFactor () |
| | Destructor.
|
| |
|
template<typename CONTAINER > |
| | NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) |
| | Constructor.
|
| |
|
virtual void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| | Print.
|
| |
|
virtual bool | equals (const NonlinearFactor &f, double tol=1e-9) const |
| | Check if two factors are equal.
|
| |
|
virtual size_t | dim () const |
| | get the dimension of the factor (number of rows on linearization)
|
| |
|
const SharedNoiseModel & | noiseModel () const |
| | access to the noise model
|
| |
| Vector | whitenedError (const Values &c) const |
| | Vector of errors, whitened This is the raw error, i.e., i.e. More...
|
| |
| virtual double | error (const Values &c) const |
| | Calculate the error of the factor. More...
|
| |
|
boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const |
| | Linearize a non-linearFactorN to get a GaussianFactor, \( Ax-b \approx h(x+\delta x)-z = h(x) + A \delta x - z \) Hence \( b = z - h(x) = - \mathtt{error\_vector}(x) \).
|
| |
|
| NonlinearFactor () |
| | Default constructor for I/O only.
|
| |
|
template<typename CONTAINER > |
| | NonlinearFactor (const CONTAINER &keys) |
| | Constructor from a collection of the keys involved in this factor.
|
| |
|
virtual | ~NonlinearFactor () |
| | Destructor.
|
| |
| virtual bool | active (const Values &) const |
| | Checks whether a factor should be used based on a set of values. More...
|
| |
| virtual shared_ptr | clone () const |
| | Creates a shared_ptr clone of the factor - needs to be specialized to allow for subclasses. More...
|
| |
|
shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| | Creates a shared_ptr clone of the factor with different keys using a map from old->new keys.
|
| |
| shared_ptr | rekey (const KeyVector &new_keys) const |
| | Clones a factor and fully replaces its keys. More...
|
| |
|
Key | front () const |
| | First key.
|
| |
|
Key | back () const |
| | Last key.
|
| |
|
const_iterator | find (Key key) const |
| | find
|
| |
|
const KeyVector & | keys () const |
| | Access the factor's involved variable keys.
|
| |
|
const_iterator | begin () const |
| | Iterator at beginning of involved variable keys.
|
| |
|
const_iterator | end () const |
| | Iterator at end of involved variable keys.
|
| |
| size_t | size () const |
| |
|
void | print (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print
|
| |
|
void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print only keys
|
| |
| KeyVector & | keys () |
| |
|
iterator | begin () |
| | Iterator at beginning of involved variable keys.
|
| |
|
iterator | end () |
| | Iterator at end of involved variable keys.
|
| |
template<class VALUE1, class VALUE2>
| virtual Vector gtsam::NoiseModelFactor2< VALUE1, VALUE2 >::evaluateError |
( |
const X1 & |
, |
|
|
const X2 & |
, |
|
|
boost::optional< Matrix & > |
H1 = boost::none, |
|
|
boost::optional< Matrix & > |
H2 = boost::none |
|
) |
| const |
|
pure virtual |
Override this method to finish implementing a binary factor.
If any of the optional Matrix reference arguments are specified, it should compute both the function evaluation and its derivative(s) in X1 (and/or X2).
Implemented in gtsam::NonlinearEquality2< VALUE >, gtsam::EssentialMatrixFactor3, gtsam::EssentialMatrixFactor2, gtsam::MagFactor2, gtsam::BoundingConstraint2< VALUE1, VALUE2 >, gtsam::GeneralSFMFactor< CAMERA, LANDMARK >, gtsam::InvDepthFactorVariant2, gtsam::InvDepthFactorVariant3a, gtsam::InvDepthFactorVariant1, gtsam::PoseBetweenFactor< POSE >, gtsam::BetweenFactor< VALUE >, gtsam::GaussMarkov1stOrderFactor< VALUE >, gtsam::VelocityConstraint, gtsam::EssentialMatrixConstraint, gtsam::BiasedGPSFactor, gtsam::RelativeElevationFactor, gtsam::OrientedPlane3Factor, and gtsam::DeltaFactor.
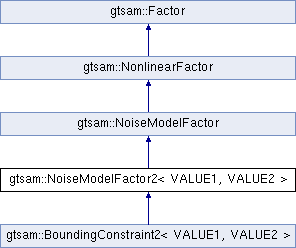
 Inheritance diagram for gtsam::NoiseModelFactor2< VALUE1, VALUE2 >:
Inheritance diagram for gtsam::NoiseModelFactor2< VALUE1, VALUE2 >: