Detailed Description
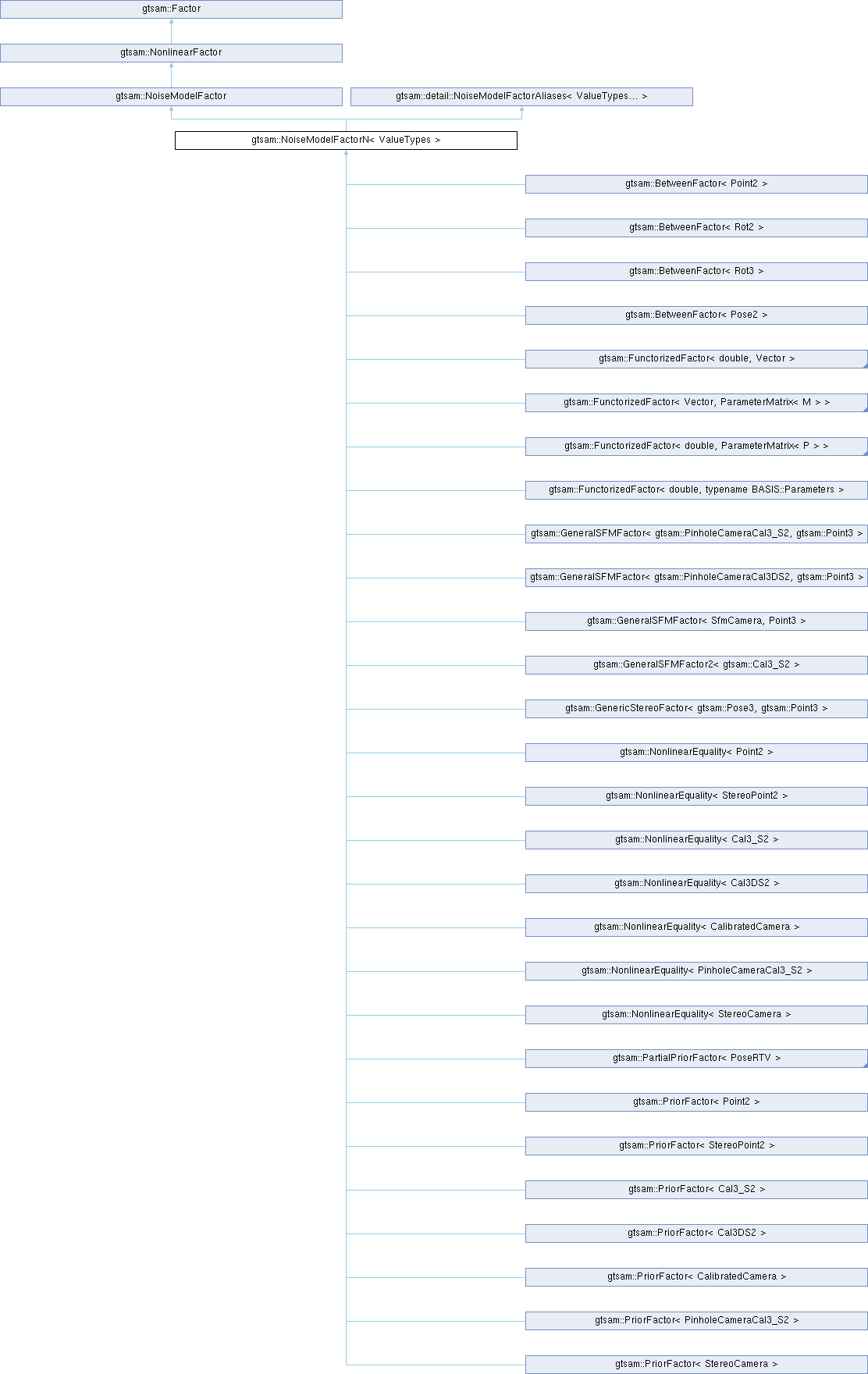
class gtsam::NoiseModelFactorN< ValueTypes >
A convenient base class for creating your own NoiseModelFactor with n variables.
To derive from this class, implement evaluateError().
For example, a 2-way factor that computes the difference in x-translation between a Pose3 and Point3 could be implemented like so:
These factors are templated on a values structure type. The values structures are typically more general than just vectors, e.g., Rot3 or Pose3, which are objects in non-linear manifolds (Lie groups).
Public Member Functions | |
| template<int I = 1> | |
| Key | key () const |
| Returns a key. | |
Constructors | |
| NoiseModelFactorN () | |
| Default Constructor for I/O. | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) | |
| Constructor. | |
| template<typename CONTAINER = std::initializer_list<Key>, typename = IsContainerOfKeys<CONTAINER>> | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) | |
| Constructor. | |
NoiseModelFactor methods | |
| Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const override |
| This implements the unwhitenedError virtual function by calling the n-key specific version of evaluateError, which is pure virtual so must be implemented in the derived class. | |
Virtual methods | |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrix< ValueTypes >... H) const =0 |
| Override evaluateError to finish implementing an n-way factor. | |
Convenience method overloads | |
| Vector | evaluateError (const ValueTypes &... x) const |
| No-Jacobians requested function overload. | |
| template<typename... OptionalJacArgs, typename = IndexIsValid<sizeof...(OptionalJacArgs) + 1>> | |
| Vector | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| Some (but not all) optional Jacobians are omitted (function overload). | |
Shortcut functions <tt>key1()</tt> -> <tt>key\<1\>()</tt> | |
| Key | key1 () const |
| template<int I = 2> | |
| Key | key2 () const |
| template<int I = 3> | |
| Key | key3 () const |
| template<int I = 4> | |
| Key | key4 () const |
| template<int I = 5> | |
| Key | key5 () const |
| template<int I = 6> | |
| Key | key6 () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor () | |
| Default constructor for I/O only. | |
| ~NoiseModelFactor () override | |
| Destructor. | |
| template<typename CONTAINER> | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Constructor. | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| Print. | |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| Check if two factors are equal. | |
| size_t | dim () const override |
| get the dimension of the factor (number of rows on linearization) | |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model | |
| Vector | whitenedError (const Values &c) const |
| Vector of errors, whitened This is the raw error, i.e., i.e. | |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector of errors, whitened, but unweighted by any loss function. | |
| double | weight (const Values &c) const |
| Compute the effective weight of the factor from the noise model. | |
| double | error (const Values &c) const override |
| Calculate the error of the factor. | |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| Linearize a non-linearFactorN to get a GaussianFactor, \( Ax-b \approx h(x+\delta x)-z = h(x) + A \delta x - z \) Hence \( b = z - h(x) = - \mathtt{error\_vector}(x) \). | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| Creates a shared_ptr clone of the factor with a new noise model. | |
| NonlinearFactor () | |
| Default constructor for I/O only. | |
| template<typename CONTAINER> | |
| NonlinearFactor (const CONTAINER &keys) | |
| Constructor from a collection of the keys involved in this factor. | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| print | |
| virtual | ~NonlinearFactor () |
| Destructor. | |
| double | error (const HybridValues &c) const override |
| All factor types need to implement an error function. | |
| virtual bool | active (const Values &) const |
| Checks whether a factor should be used based on a set of values. | |
| virtual shared_ptr | clone () const |
| Creates a shared_ptr clone of the factor - needs to be specialized to allow for subclasses. | |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| Creates a shared_ptr clone of the factor with different keys using a map from old->new keys. | |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| Clones a factor and fully replaces its keys. | |
| virtual bool | sendable () const |
| Should the factor be evaluated in the same thread as the caller This is to enable factors that has shared states (like the Python GIL lock). | |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). | |
| Key | front () const |
| First key. | |
| Key | back () const |
| Last key. | |
| const_iterator | find (Key key) const |
| find | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. | |
| const_iterator | begin () const |
| Iterator at beginning of involved variable keys. | |
| const_iterator | end () const |
| Iterator at end of involved variable keys. | |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
| KeyVector & | keys () |
| iterator | begin () |
| Iterator at beginning of involved variable keys. | |
| iterator | end () |
| Iterator at end of involved variable keys. | |
Public Types | |
| enum | { N = sizeof...(ValueTypes) } |
| N is the number of variables (N-way factor). | |
| template<int I, typename = IndexIsValid<I>> | |
| using | ValueType |
| The type of the I'th template param can be obtained as ValueType. | |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Noise model. | |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. | |
Protected Types | |
| using | Base = NoiseModelFactor |
| using | This = NoiseModelFactorN<ValueTypes...> |
| template<typename T> | |
| using | OptionalMatrix = boost::optional<Matrix&> |
| template<typename T> | |
| using | KeyType = Key |
SFINAE aliases | |
| template<typename From, typename To> | |
| using | IsConvertible |
| template<int I> | |
| using | IndexIsValid |
| template<typename Container> | |
| using | ContainerElementType |
| template<typename Container> | |
| using | IsContainerOfKeys = IsConvertible<ContainerElementType<Container>, Key> |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
Friends | |
| class | boost::serialization::access |
| Serialization function. | |
Additional Inherited Members | |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Constructor - only for subclasses, as this does not set keys. | |
| Factor () | |
| Default constructor for I/O. | |
| template<typename CONTAINER> | |
| Factor (const CONTAINER &keys) | |
| Construct factor from container of keys. | |
| template<typename ITERATOR> | |
| Factor (ITERATOR first, ITERATOR last) | |
| Construct factor from iterator keys. | |
| template<typename CONTAINER> | |
| static Factor | FromKeys (const CONTAINER &keys) |
| Construct factor from container of keys. | |
| template<typename ITERATOR> | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Construct factor from iterator keys. | |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. | |
Member Typedef Documentation
◆ ContainerElementType
|
protected |
◆ IndexIsValid
|
protected |
◆ IsConvertible
|
protected |
◆ ValueType
| using gtsam::NoiseModelFactorN< ValueTypes >::ValueType |
The type of the I'th template param can be obtained as ValueType.
I is 1-indexed for backwards compatibility/consistency! So for example,
You can also use the shortcuts X1, ..., X6 which are the same as ValueType<1>, ..., ValueType<6> respectively (see detail::NoiseModelFactorAliases).
Note that, if your class is templated AND you want to use ValueType<1> inside your class, due to dependent types you need the template keyword: typename MyFactor<T>::template ValueType<1>.
Constructor & Destructor Documentation
◆ NoiseModelFactorN() [1/2]
|
inline |
Constructor.
Example usage: NoiseModelFactorN(noise, key1, key2, ..., keyN)
- Parameters
-
noiseModel Shared pointer to noise model. keys Keys for the variables in this factor, passed in as separate arguments.
◆ NoiseModelFactorN() [2/2]
|
inline |
Constructor.
Example usage: NoiseModelFactorN(noise, {key1, key2, ..., keyN}) Example usage: NoiseModelFactorN(noise, keys) where keys is a vector<Key>
- Parameters
-
noiseModel Shared pointer to noise model. keys A container of keys for the variables in this factor.
Member Function Documentation
◆ evaluateError() [1/3]
|
inline |
No-Jacobians requested function overload.
This specializes the version below to avoid recursive calls since this is commonly used.
e.g. const Vector error = factor.evaluateError(pose, point);
◆ evaluateError() [2/3]
|
inline |
Some (but not all) optional Jacobians are omitted (function overload).
e.g. const Vector error = factor.evaluateError(pose, point, Hpose);
◆ evaluateError() [3/3]
|
pure virtual |
Override evaluateError to finish implementing an n-way factor.
Both the x and H arguments are written here as parameter packs, but when overriding this method, you probably want to explicitly write them out. For example, for a 2-way factor with variable types Pose3 and Point3, you should implement:
If any of the optional Matrix reference arguments are specified, it should compute both the function evaluation and its derivative(s) in the requested variables.
- Parameters
-
x The values of the variables to evaluate the error for. Passed in as separate arguments. [out] H The Jacobian with respect to each variable (optional).
◆ key()
|
inline |
Returns a key.
Usage: key<I>() returns the I'th key. I is 1-indexed for backwards compatibility/consistency! So for example,
Note that, if your class is templated AND you are trying to call key<1> inside your class, due to dependent types you need the template keyword: this->key1().
◆ unwhitenedError()
|
inlineoverridevirtual |
This implements the unwhitenedError virtual function by calling the n-key specific version of evaluateError, which is pure virtual so must be implemented in the derived class.
Example usage:
- Parameters
-
[in] x A Values object containing the values of all the variables used in this factor [out] H A vector of (dynamic) matrices whose size should be equal to n. The Jacobians w.r.t. each variable will be output in this parameter.
Implements gtsam::NoiseModelFactor.
The documentation for this class was generated from the following file:
- /tmp/gtsam-4.2-docs.H5EUbA/src/gtsam/nonlinear/NonlinearFactor.h