Detailed Description
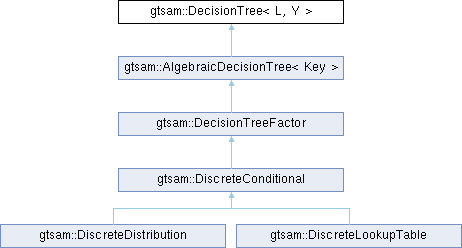
class gtsam::DecisionTree< L, Y >
a decision tree is a function from assignments to values.
- Template Parameters
-
L label for variables Y function range (any algebra), e.g., bool, int, double
After creating a decision tree on some variables, the tree can be evaluated on an assignment to those variables. Example:
More examples can be found in testDecisionTree.cpp
Public Member Functions | |
Standard Constructors | |
| DecisionTree () | |
| Default constructor (for serialization). | |
| DecisionTree (const Y &y) | |
| Create a constant. | |
| DecisionTree (const L &label, const Y &y1, const Y &y2) | |
| Create tree with 2 assignments y1, y2, splitting on variable label. | |
| DecisionTree (const LabelC &label, const Y &y1, const Y &y2) | |
| Allow Label+Cardinality for convenience. | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::vector< Y > &ys) | |
| Create from keys and a corresponding vector of values. | |
| DecisionTree (const std::vector< LabelC > &labelCs, const std::string &table) | |
| Create from keys and string table. | |
| template<typename Iterator> | |
| DecisionTree (Iterator begin, Iterator end, const L &label) | |
| Create DecisionTree from others. | |
| DecisionTree (const L &label, const DecisionTree &f0, const DecisionTree &f1) | |
| Create DecisionTree from two others. | |
| template<typename X, typename Func> | |
| DecisionTree (const DecisionTree< L, X > &other, Func Y_of_X) | |
| Convert from a different value type. | |
| template<typename M, typename X, typename Func> | |
| DecisionTree (const DecisionTree< M, X > &other, const std::map< M, L > &map, Func Y_of_X) | |
| Convert from a different value type X to value type Y, also transate labels via map from type M to L. | |
Testable | |
| void | print (const std::string &s, const LabelFormatter &labelFormatter, const ValueFormatter &valueFormatter) const |
| GTSAM-style print. | |
| bool | equals (const DecisionTree &other, const CompareFunc &compare=&DefaultCompare) const |
Standard Interface | |
| virtual | ~DecisionTree ()=default |
| Make virtual. | |
| bool | empty () const |
| Check if tree is empty. | |
| bool | operator== (const DecisionTree &q) const |
| equality | |
| const Y & | operator() (const Assignment< L > &x) const |
| evaluate | |
| template<typename Func> | |
| void | visit (Func f) const |
| Visit all leaves in depth-first fashion. | |
| template<typename Func> | |
| void | visitLeaf (Func f) const |
| Visit all leaves in depth-first fashion. | |
| template<typename Func> | |
| void | visitWith (Func f) const |
| Visit all leaves in depth-first fashion. | |
| size_t | nrLeaves () const |
| Return the number of leaves in the tree. | |
| template<typename Func, typename X> | |
| X | fold (Func f, X x0) const |
| Fold a binary function over the tree, returning accumulator. | |
| std::set< L > | labels () const |
| Retrieve all unique labels as a set. | |
| DecisionTree | apply (const Unary &op) const |
| apply Unary operation "op" to f | |
| DecisionTree | apply (const UnaryAssignment &op) const |
| Apply Unary operation "op" to f while also providing the corresponding assignment. | |
| DecisionTree | apply (const DecisionTree &g, const Binary &op) const |
| apply binary operation "op" to f and g | |
| DecisionTree | choose (const L &label, size_t index) const |
| create a new function where value(label)==index It's like "restrict" in Darwiche09book pg329, 330? | |
| DecisionTree | combine (const L &label, size_t cardinality, const Binary &op) const |
| combine subtrees on key with binary operation "op" | |
| DecisionTree | combine (const LabelC &labelC, const Binary &op) const |
| combine with LabelC for convenience | |
| void | dot (std::ostream &os, const LabelFormatter &labelFormatter, const ValueFormatter &valueFormatter, bool showZero=true) const |
| output to graphviz format, stream version | |
| void | dot (const std::string &name, const LabelFormatter &labelFormatter, const ValueFormatter &valueFormatter, bool showZero=true) const |
| output to graphviz format, open a file | |
| std::string | dot (const LabelFormatter &labelFormatter, const ValueFormatter &valueFormatter, bool showZero=true) const |
| output to graphviz format string | |
Advanced Interface | |
| DecisionTree (const NodePtr &root) | |
| template<typename Iterator> | |
| NodePtr | compose (Iterator begin, Iterator end, const L &label) const |
Public Attributes | |
| NodePtr | root_ |
| A DecisionTree just contains the root. TODO(dellaert): make protected. | |
Public Types | |
| using | LabelFormatter = std::function<std::string(L)> |
| using | ValueFormatter = std::function<std::string(Y)> |
| using | CompareFunc = std::function<bool(const Y&, const Y&)> |
| using | Unary = std::function<Y(const Y&)> |
| Handy typedefs for unary and binary function types. | |
| using | UnaryAssignment = std::function<Y(const Assignment<L>&, const Y&)> |
| using | Binary = std::function<Y(const Y&, const Y&)> |
| using | LabelC = std::pair<L, size_t> |
| A label annotated with cardinality. | |
| using | NodePtr = typename Node::Ptr |
| ---------------------— Node base class ------------------------— | |
Classes | |
| struct | Node |
| ---------------------— Node base class ------------------------— More... | |
| struct | Leaf |
| struct | Choice |
Protected Member Functions | |
| template<typename It, typename ValueIt> | |
| NodePtr | create (It begin, It end, ValueIt beginY, ValueIt endY) const |
| Internal recursive function to create from keys, cardinalities, and Y values. | |
| template<typename M, typename X> | |
| NodePtr | convertFrom (const typename DecisionTree< M, X >::NodePtr &f, std::function< L(const M &)> L_of_M, std::function< Y(const X &)> Y_of_X) const |
| Convert from a DecisionTree<M, X> to DecisionTree<L, Y>. | |
Static Protected Member Functions | |
| static bool | DefaultCompare (const Y &a, const Y &b) |
| Default method for comparison of two objects of type Y. | |
Friends | |
| class | boost::serialization::access |
| Serialization function. | |
Member Typedef Documentation
◆ NodePtr
| using gtsam::DecisionTree< L, Y >::NodePtr = typename Node::Ptr |
---------------------— Node base class ------------------------—
A function is a shared pointer to the root of a DT
Constructor & Destructor Documentation
◆ DecisionTree() [1/3]
| gtsam::DecisionTree< L, Y >::DecisionTree | ( | const L & | label, |
| const Y & | y1, | ||
| const Y & | y2 ) |
Create tree with 2 assignments y1, y2, splitting on variable label.
- Parameters
-
label The variable to split on. y1 The value for the first assignment. y2 The value for the second assignment.
◆ DecisionTree() [2/3]
| gtsam::DecisionTree< L, Y >::DecisionTree | ( | const DecisionTree< L, X > & | other, |
| Func | Y_of_X ) |
Convert from a different value type.
- Template Parameters
-
X The previous value type.
- Parameters
-
other The DecisionTree to convert from. Y_of_X Functor to convert from value type X to type Y.
◆ DecisionTree() [3/3]
| gtsam::DecisionTree< L, Y >::DecisionTree | ( | const DecisionTree< M, X > & | other, |
| const std::map< M, L > & | map, | ||
| Func | Y_of_X ) |
Convert from a different value type X to value type Y, also transate labels via map from type M to L.
- Template Parameters
-
M Previous label type. X Previous value type.
- Parameters
-
other The decision tree to convert. L_of_M Map from label type M to type L. Y_of_X Functor to convert from type X to type Y.
Member Function Documentation
◆ apply()
| DecisionTree< L, Y > gtsam::DecisionTree< L, Y >::apply | ( | const UnaryAssignment & | op | ) | const |
Apply Unary operation "op" to f while also providing the corresponding assignment.
Apply unary operator with assignment.
- Parameters
-
op Function which takes Assignment<L> and Y as input and returns object of type Y.
- Returns
- DecisionTree
◆ convertFrom()
|
protected |
Convert from a DecisionTree<M, X> to DecisionTree<L, Y>.
- Template Parameters
-
M The previous label type. X The previous value type.
- Parameters
-
f The node pointer to the root of the previous DecisionTree. L_of_M Functor to convert from label type M to type L. Y_of_X Functor to convert from value type X to type Y.
- Returns
- NodePtr
◆ fold()
| X gtsam::DecisionTree< L, Y >::fold | ( | Func | f, |
| X | x0 ) const |
Fold a binary function over the tree, returning accumulator.
- Template Parameters
-
X type for accumulator.
- Parameters
-
f binary function: Y * X -> X returning an updated accumulator. x0 initial value for accumulator.
- Returns
- X final value for accumulator.
- Note
- X is always passed by value.
- Due to pruning, leaves might not exhaust choices.
Example: auto add = [](const double& y, double x) { return y + x; }; double sum = tree.fold(add, 0.0);
◆ labels()
| std::set< L > gtsam::DecisionTree< L, Y >::labels | ( | ) | const |
Retrieve all unique labels as a set.
Get (partial) labels by performing a visit.
This method performs a depth-first search to go to every leaf and records the keys assignment which leads to that leaf. Since the tree can be pruned, there might be a leaf at a lower depth which results in a partial assignment (i.e. not all keys are specified).
E.g. given a tree with 3 keys, there may be a branch where the 3rd key has the same values for all the leaves. This leads to the branch being pruned so we get a leaf which is arrived at by just the first 2 keys and their assignments.
◆ print()
| void gtsam::DecisionTree< L, Y >::print | ( | const std::string & | s, |
| const LabelFormatter & | labelFormatter, | ||
| const ValueFormatter & | valueFormatter ) const |
GTSAM-style print.
- Parameters
-
s Prefix string. labelFormatter Functor to format the node label. valueFormatter Functor to format the node value.
◆ visit()
| void gtsam::DecisionTree< L, Y >::visit | ( | Func | f | ) | const |
Visit all leaves in depth-first fashion.
- Parameters
-
f (side-effect) Function taking the value of the leaf node.
- Note
- Due to pruning, the number of leaves may not be the same as the number of assignments. E.g. if we have a tree on 2 binary variables with all values being 1, then there are 2^2=4 assignments, but only 1 leaf.
Example: int sum = 0; auto visitor = [&](int y) { sum += y; }; tree.visit(visitor);
◆ visitLeaf()
| void gtsam::DecisionTree< L, Y >::visitLeaf | ( | Func | f | ) | const |
Visit all leaves in depth-first fashion.
- Parameters
-
f (side-effect) Function taking the leaf node pointer.
- Note
- Due to pruning, the number of leaves may not be the same as the number of assignments. E.g. if we have a tree on 2 binary variables with all values being 1, then there are 2^2=4 assignments, but only 1 leaf.
Example: int sum = 0; auto visitor = [&](const Leaf& leaf) { sum += leaf.constant(); }; tree.visitLeaf(visitor);
◆ visitWith()
| void gtsam::DecisionTree< L, Y >::visitWith | ( | Func | f | ) | const |
Visit all leaves in depth-first fashion.
- Parameters
-
f (side-effect) Function taking an assignment and a value.
- Note
- Due to pruning, the number of leaves may not be the same as the number of assignments. E.g. if we have a tree on 2 binary variables with all values being 1, then there are 2^2=4 assignments, but only 1 leaf.
Example: int sum = 0; auto visitor = [&](const Assignment<L>& assignment, int y) { sum += y; }; tree.visitWith(visitor);
The documentation for this class was generated from the following files:
- /tmp/gtsam-4.2-docs.H5EUbA/src/gtsam/discrete/DecisionTree.h
- /tmp/gtsam-4.2-docs.H5EUbA/src/gtsam/discrete/DecisionTree-inl.h