gtsam::GaussianISAM Class Reference
 Inheritance diagram for gtsam::GaussianISAM:
Inheritance diagram for gtsam::GaussianISAM: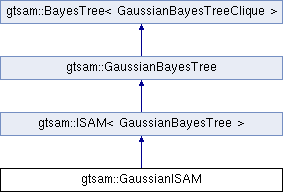
Public Member Functions | |
Standard Constructors | |
| GaussianISAM () | |
| Create an empty Bayes Tree. | |
| GaussianISAM (const GaussianBayesTree &bayesTree) | |
| Copy constructor. | |
| Public Member Functions inherited from gtsam::ISAM< GaussianBayesTree > | |
| ISAM () | |
| Create an empty Bayes Tree. | |
| ISAM (const Base &bayesTree) | |
| Copy constructor. | |
| void | update (const FactorGraphType &newFactors, const Eliminate &function=EliminationTraitsType::DefaultEliminate) |
| update the Bayes tree with a set of new factors, typically derived from measurements More... | |
| void | update_internal (const FactorGraphType &newFactors, Cliques &orphans, const Eliminate &function=EliminationTraitsType::DefaultEliminate) |
| update_internal provides access to list of orphans for drawing purposes | |
| Public Member Functions inherited from gtsam::GaussianBayesTree | |
| GaussianBayesTree () | |
| Default constructor, creates an empty Bayes tree. | |
| bool | equals (const This &other, double tol=1e-9) const |
| Check equality. | |
| VectorValues | optimize () const |
| Recursively optimize the BayesTree to produce a vector solution. More... | |
| VectorValues | optimizeGradientSearch () const |
| Optimize along the gradient direction, with a closed-form computation to perform the line search. More... | |
| VectorValues | gradient (const VectorValues &x0) const |
| Compute the gradient of the energy function, \( \nabla_{x=x_0} \left\Vert \Sigma^{-1} R x - d \right\Vert^2 \), centered around \( x = x_0 \). More... | |
| VectorValues | gradientAtZero () const |
| Compute the gradient of the energy function, \( \nabla_{x=0} \left\Vert \Sigma^{-1} R x - d \right\Vert^2 \), centered around zero. More... | |
| double | error (const VectorValues &x) const |
| Mahalanobis norm error. More... | |
| double | determinant () const |
| Computes the determinant of a GassianBayesTree, as if the Bayes tree is reorganized into a matrix. More... | |
| double | logDeterminant () const |
| Computes the determinant of a GassianBayesTree, as if the Bayes tree is reorganized into a matrix. More... | |
| Matrix | marginalCovariance (Key key) const |
| Return the marginal on the requested variable as a covariance matrix. More... | |
| Public Member Functions inherited from gtsam::BayesTree< GaussianBayesTreeClique > | |
| size_t | size () const |
| number of cliques | |
| bool | empty () const |
| Check if there are any cliques in the tree. | |
| const Nodes & | nodes () const |
| return nodes | |
| const sharedNode | operator[] (Key j) const |
| Access node by variable. | |
| const Roots & | roots () const |
| return root cliques | |
| const sharedClique & | clique (Key j) const |
| alternate syntax for matlab: find the clique that contains the variable with Key j | |
| BayesTreeCliqueData | getCliqueData () const |
| Gather data on all cliques. | |
| size_t | numCachedSeparatorMarginals () const |
| Collect number of cliques with cached separator marginals. | |
| sharedConditional | marginalFactor (Key j, const Eliminate &function=EliminationTraitsType::DefaultEliminate) const |
| Return marginal on any variable. More... | |
| sharedFactorGraph | joint (Key j1, Key j2, const Eliminate &function=EliminationTraitsType::DefaultEliminate) const |
| return joint on two variables Limitation: can only calculate joint if cliques are disjoint or one of them is root | |
| sharedBayesNet | jointBayesNet (Key j1, Key j2, const Eliminate &function=EliminationTraitsType::DefaultEliminate) const |
| return joint on two variables as a BayesNet Limitation: can only calculate joint if cliques are disjoint or one of them is root | |
| void | saveGraph (const std::string &s, const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| Read only with side effects. More... | |
| Key | findParentClique (const CONTAINER &parents) const |
| Find parent clique of a conditional. More... | |
| void | clear () |
| Remove all nodes. | |
| void | deleteCachedShortcuts () |
| Clear all shortcut caches - use before timing on marginal calculation to avoid residual cache data. | |
| void | removePath (sharedClique clique, BayesNetType &bn, Cliques &orphans) |
| Remove path from clique to root and return that path as factors plus a list of orphaned subtree roots. More... | |
| void | removeTop (const KeyVector &keys, BayesNetType &bn, Cliques &orphans) |
| Given a list of indices, turn "contaminated" part of the tree back into a factor graph. More... | |
| Cliques | removeSubtree (const sharedClique &subtree) |
| Remove the requested subtree. More... | |
| void | insertRoot (const sharedClique &subtree) |
| Insert a new subtree with known parent clique. More... | |
| void | addClique (const sharedClique &clique, const sharedClique &parent_clique=sharedClique()) |
| add a clique (top down) | |
| void | addFactorsToGraph (FactorGraph< FactorType > &graph) const |
| Add all cliques in this BayesTree to the specified factor graph. | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const |
| print | |
Public Types | |
| typedef ISAM< GaussianBayesTree > | Base |
| typedef GaussianISAM | This |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::ISAM< GaussianBayesTree > | |
| typedef GaussianBayesTree | Base |
| typedef Base::BayesNetType | BayesNetType |
| typedef Base::FactorGraphType | FactorGraphType |
| typedef Base::Clique | Clique |
| typedef Base::sharedClique | sharedClique |
| typedef Base::Cliques | Cliques |
| Public Types inherited from gtsam::GaussianBayesTree | |
| typedef GaussianBayesTree | This |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::BayesTree< GaussianBayesTreeClique > | |
| typedef GaussianBayesTreeClique | Clique |
| The clique type, normally BayesTreeClique. | |
| typedef boost::shared_ptr< Clique > | sharedClique |
| Shared pointer to a clique. | |
| typedef Clique | Node |
| Synonym for Clique (TODO: remove) | |
| typedef sharedClique | sharedNode |
| Synonym for sharedClique (TODO: remove) | |
| typedef GaussianBayesTreeClique ::ConditionalType | ConditionalType |
| typedef boost::shared_ptr< ConditionalType > | sharedConditional |
| typedef GaussianBayesTreeClique ::BayesNetType | BayesNetType |
| typedef boost::shared_ptr< BayesNetType > | sharedBayesNet |
| typedef GaussianBayesTreeClique ::FactorType | FactorType |
| typedef boost::shared_ptr< FactorType > | sharedFactor |
| typedef GaussianBayesTreeClique ::FactorGraphType | FactorGraphType |
| typedef boost::shared_ptr< FactorGraphType > | sharedFactorGraph |
| typedef FactorGraphType::Eliminate | Eliminate |
| typedef GaussianBayesTreeClique ::EliminationTraitsType | EliminationTraitsType |
| typedef FastList< sharedClique > | Cliques |
| A convenience class for a list of shared cliques. | |
| typedef ConcurrentMap< Key, sharedClique > | Nodes |
| Map from keys to Clique. | |
Additional Inherited Members | |
| Protected Types inherited from gtsam::BayesTree< GaussianBayesTreeClique > | |
| typedef BayesTree< GaussianBayesTreeClique > | This |
| typedef boost::shared_ptr< This > | shared_ptr |
| typedef FastVector< sharedClique > | Roots |
| Root cliques. | |
| Protected Member Functions inherited from gtsam::BayesTree< GaussianBayesTreeClique > | |
| This & | operator= (const This &other) |
| Assignment operator. | |
| BayesTree () | |
| Create an empty Bayes Tree. | |
| BayesTree (const This &other) | |
| Copy constructor. | |
| void | getCliqueData (BayesTreeCliqueData &stats, sharedClique clique) const |
| Gather data on a single clique. | |
| void | saveGraph (std::ostream &s, sharedClique clique, const KeyFormatter &keyFormatter, int parentnum=0) const |
| private helper method for saving the Tree to a text file in GraphViz format | |
| void | removeClique (sharedClique clique) |
| remove a clique: warning, can result in a forest | |
| void | fillNodesIndex (const sharedClique &subtree) |
| Fill the nodes index for a subtree. | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
| Protected Attributes inherited from gtsam::BayesTree< GaussianBayesTreeClique > | |
| Nodes | nodes_ |
| Map from indices to Clique. | |
| Roots | roots_ |
| Root cliques. | |
The documentation for this class was generated from the following files:
- /Users/dellaert/git/gtsam/gtsam/linear/GaussianISAM.h
- /Users/dellaert/git/gtsam/gtsam/linear/GaussianISAM.cpp
