gtsam::Constraint Class Referenceabstract
Detailed Description
Base class for discrete probabilistic factors The most general one is the derived DecisionTreeFactor.
 Inheritance diagram for gtsam::Constraint:
Inheritance diagram for gtsam::Constraint: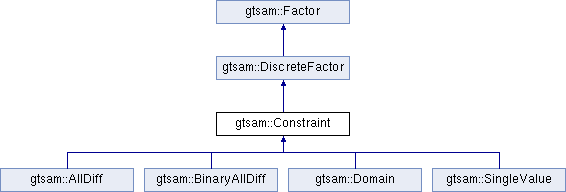
Public Member Functions | |
Standard Constructors | |
| Constraint () | |
| Default constructor for I/O. | |
| ~Constraint () override | |
| Virtual destructor. | |
Standard Interface | |
| virtual bool | ensureArcConsistency (size_t j, std::vector< Domain > &domains) const =0 |
| virtual shared_ptr | partiallyApply (const Values &) const =0 |
| Partially apply known values. More... | |
| virtual shared_ptr | partiallyApply (const std::vector< Domain > &) const =0 |
| Partially apply known values, domain version. More... | |
| Public Member Functions inherited from gtsam::DiscreteFactor | |
| DiscreteFactor () | |
| Default constructor creates empty factor. | |
| template<typename CONTAINER > | |
| DiscreteFactor (const CONTAINER &keys) | |
| Construct from container of keys. More... | |
| virtual | ~DiscreteFactor () |
| Virtual destructor. | |
| virtual bool | equals (const DiscreteFactor &lf, double tol=1e-9) const =0 |
| equals More... | |
| void | print (const std::string &s="DiscreteFactor\n", const KeyFormatter &formatter=DefaultKeyFormatter) const override |
| print More... | |
| virtual bool | empty () const |
| Test whether the factor is empty. | |
| virtual double | operator() (const Values &) const =0 |
| Find value for given assignment of values to variables. More... | |
| virtual DecisionTreeFactor | operator* (const DecisionTreeFactor &) const =0 |
| Multiply in a DecisionTreeFactor and return the result as DecisionTreeFactor. More... | |
| virtual DecisionTreeFactor | toDecisionTreeFactor () const =0 |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. | |
| KeyVector & | keys () |
| iterator | begin () |
| Iterator at beginning of involved variable keys. | |
| iterator | end () |
| Iterator at end of involved variable keys. | |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| Key | front () const |
| First key. | |
| Key | back () const |
| Last key. | |
| const_iterator | find (Key key) const |
| find | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. | |
| const_iterator | begin () const |
| Iterator at beginning of involved variable keys. | |
| const_iterator | end () const |
| Iterator at end of involved variable keys. | |
| size_t | size () const |
Public Types | |
| typedef boost::shared_ptr< Constraint > | shared_ptr |
| Public Types inherited from gtsam::DiscreteFactor | |
| typedef DiscreteFactor | This |
| This class. | |
| typedef boost::shared_ptr< DiscreteFactor > | shared_ptr |
| shared_ptr to this class | |
| typedef Factor | Base |
| Our base class. | |
| typedef Assignment< Key > | Values |
| A map from keys to values TODO: Do we need this? Should we just use gtsam::Values? We just need another special DiscreteValue to represent labels, However, all other Lie's operators are undefined in this class. More... | |
| typedef boost::shared_ptr< Values > | sharedValues |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. | |
Protected Member Functions | |
| Constraint (const KeyVector &js) | |
| Construct n-way factor. | |
| Constraint (Key j) | |
| Construct unary factor. | |
| Constraint (Key j1, Key j2) | |
| Construct binary factor. | |
| template<class KeyIterator > | |
| Constraint (KeyIterator beginKey, KeyIterator endKey) | |
| construct from container | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| Default constructor for I/O. | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| Construct factor from container of keys. More... | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Construct factor from iterator keys. More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
Additional Inherited Members | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| Construct factor from container of keys. More... | |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Construct factor from iterator keys. More... | |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. | |
Member Function Documentation
◆ partiallyApply() [1/2]
|
pure virtual |
Partially apply known values, domain version.
Implemented in gtsam::AllDiff, gtsam::BinaryAllDiff, gtsam::Domain, and gtsam::SingleValue.
◆ partiallyApply() [2/2]
|
pure virtual |
Partially apply known values.
Implemented in gtsam::AllDiff, gtsam::BinaryAllDiff, gtsam::Domain, and gtsam::SingleValue.
The documentation for this class was generated from the following file:
- /Users/dellaert/git/github/gtsam_unstable/discrete/Constraint.h