template<typename T>
class gtsam::ExpressionFactor< T >
Factor that supports arbitrary expressions via AD.
Arbitrary instances of this template can be directly inserted into a factor graph for optimization. However, to enable the correct (de)serialization of such instances, the user should declare derived classes from this template, implementing expresion(), serialize(), clone(), print(), and defining the corresponding struct traits<NewFactor> : public Testable<NewFactor> {}.
- Template Parameters
-
|
| | ExpressionFactor (const SharedNoiseModel &noiseModel, const T &measurement, const Expression< T > &expression) |
| | Constructor: creates a factor from a measurement and measurement function. More...
|
| |
|
| ~ExpressionFactor () override |
| | Destructor.
|
| |
|
const T & | measured () const |
| | return the measurement
|
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| | print relies on Testable traits being defined for T More...
|
| |
| bool | equals (const NonlinearFactor &f, double tol) const override |
| | equals relies on Testable traits being defined for T More...
|
| |
| Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const override |
| | Error function without the NoiseModel, \( z-h(x) -> Local(h(x),z) \). More...
|
| |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| | linearize to a GaussianFactor More...
|
| |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| |
|
| NoiseModelFactor () |
| | Default constructor for I/O only.
|
| |
|
| ~NoiseModelFactor () override |
| | Destructor.
|
| |
|
template<typename CONTAINER > |
| | NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) |
| | Constructor.
|
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| | Print. More...
|
| |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| | Check if two factors are equal. More...
|
| |
| size_t | dim () const override |
| | get the dimension of the factor (number of rows on linearization) More...
|
| |
|
const SharedNoiseModel & | noiseModel () const |
| | access to the noise model
|
| |
| virtual Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const =0 |
| | Error function without the NoiseModel, \( z-h(x) \). More...
|
| |
| Vector | whitenedError (const Values &c) const |
| | Vector of errors, whitened This is the raw error, i.e., i.e. More...
|
| |
|
Vector | unweightedWhitenedError (const Values &c) const |
| | Vector of errors, whitened, but unweighted by any loss function.
|
| |
|
double | weight (const Values &c) const |
| | Compute the effective weight of the factor from the noise model.
|
| |
| double | error (const Values &c) const override |
| | Calculate the error of the factor. More...
|
| |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| | Linearize a non-linearFactorN to get a GaussianFactor, \( Ax-b \approx h(x+\delta x)-z = h(x) + A \delta x - z \) Hence \( b = z - h(x) = - \mathtt{error\_vector}(x) \). More...
|
| |
|
shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| | Creates a shared_ptr clone of the factor with a new noise model.
|
| |
|
| NonlinearFactor () |
| | Default constructor for I/O only.
|
| |
|
template<typename CONTAINER > |
| | NonlinearFactor (const CONTAINER &keys) |
| | Constructor from a collection of the keys involved in this factor.
|
| |
|
virtual | ~NonlinearFactor () |
| | Destructor.
|
| |
| virtual bool | active (const Values &) const |
| | Checks whether a factor should be used based on a set of values. More...
|
| |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| | Creates a shared_ptr clone of the factor with different keys using a map from old->new keys. More...
|
| |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| | Clones a factor and fully replaces its keys. More...
|
| |
| virtual bool | sendable () const |
| | Should the factor be evaluated in the same thread as the caller This is to enable factors that has shared states (like the Python GIL lock) More...
|
| |
|
virtual | ~Factor ()=default |
| | Default destructor.
|
| |
| KeyVector & | keys () |
| |
|
iterator | begin () |
| | Iterator at beginning of involved variable keys.
|
| |
|
iterator | end () |
| | Iterator at end of involved variable keys.
|
| |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| | print only keys More...
|
| |
|
Key | front () const |
| | First key.
|
| |
|
Key | back () const |
| | Last key.
|
| |
|
const_iterator | find (Key key) const |
| | find
|
| |
|
const KeyVector & | keys () const |
| | Access the factor's involved variable keys.
|
| |
|
const_iterator | begin () const |
| | Iterator at beginning of involved variable keys.
|
| |
|
const_iterator | end () const |
| | Iterator at end of involved variable keys.
|
| |
| size_t | size () const |
| |
|
| | ExpressionFactor (const SharedNoiseModel &noiseModel, const T &measurement) |
| | Default constructor, for serialization. More...
|
| |
|
void | initialize (const Expression< T > &expression) |
| | Initialize with constructor arguments.
|
| |
| virtual Expression< T > | expression () const |
| | Recreate expression from keys_ and measured_, used in load below. More...
|
| |
|
| NoiseModelFactor (const SharedNoiseModel &noiseModel) |
| | Constructor - only for subclasses, as this does not set keys.
|
| |
|
| Factor () |
| | Default constructor for I/O.
|
| |
| template<typename CONTAINER > |
| | Factor (const CONTAINER &keys) |
| | Construct factor from container of keys. More...
|
| |
| template<typename ITERATOR > |
| | Factor (ITERATOR first, ITERATOR last) |
| | Construct factor from iterator keys. More...
|
| |
|
bool | equals (const This &other, double tol=1e-9) const |
| | check equality
|
| |
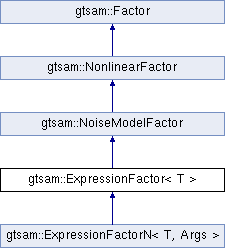
 Inheritance diagram for gtsam::ExpressionFactor< T >:
Inheritance diagram for gtsam::ExpressionFactor< T >: